ビジョン処理の結果を使い切る¶
機能¶
指定した ビジョン処理による移動 ステップのビジョン処理の結果が使い切れたかをチェックします。
ヒント
ビジョン処理による移動 ステップのパラメータ ビジョン処理の結果を再使用 にチェックを入れなければ使用できません。
使用シーン¶
ビジョン処理による移動 ステップのビジョン処理の結果に複数の使用可能なビジョン位置姿勢がある場合、それが全部使用されるまでロボットが順番に把持を実行します。
ビジョン処理の結果にある位置姿勢を使い切れたら画像を取得します。短いタクトタイムが求められる現場では、ビジョン処理の結果を再使用することでビジョン処理の時間を短縮できます。
パラメータ説明¶
- 非移動ステップの共通パラメータ
詳しくは 非移動ステップの共通パラメータ をお読みください。
- 事前計画する出口のインデックス
スムーズな計画のために、事前計画する出口を指定する必要があります。普通は実行する可能性の高い出口を指定し、再度計画を回避してロボットの待機時間を短縮します。
-1 :事前計画する出口を指定しません。
0 :使い切っていない 出口から実行します。
1 :使い切れ 出口から実行します。
- 「ビジョン処理による移動」を選択
チェックしたい ビジョン処理による移動 ステップを選択します。
例¶
デパレタイジングのプロジェクトでは一回撮影してから段ごとの箱を把持します。ビジョン処理の結果が使い切れ ステップを使用して ビジョン処理による移動 の結果が使い切れたかを判断します。
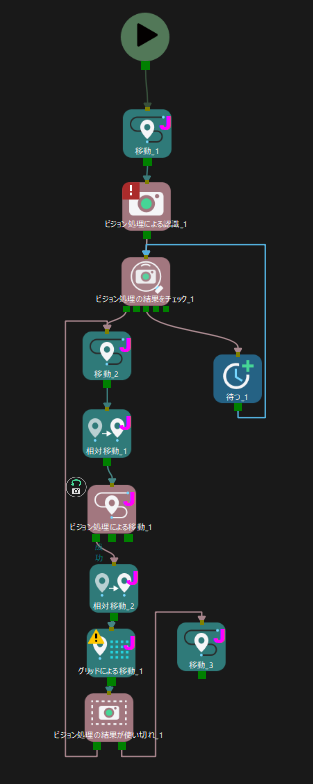
ビジョン処理の結果が 使い切っていない:把持を繰り返して実行します。「移動_2 → relative_move_1 → vision_move_1 → relative_move_3 → グリッドによる移動_1 → ビジョン処理の結果が使い切れ」を実行します。
ビジョン処理の結果が 使い切れ:使い切れ 出口から実行します。