ようこそ
応用
ソフトウェアの使用ガイド
ロボットの通信設定
サポート
付録
注釈
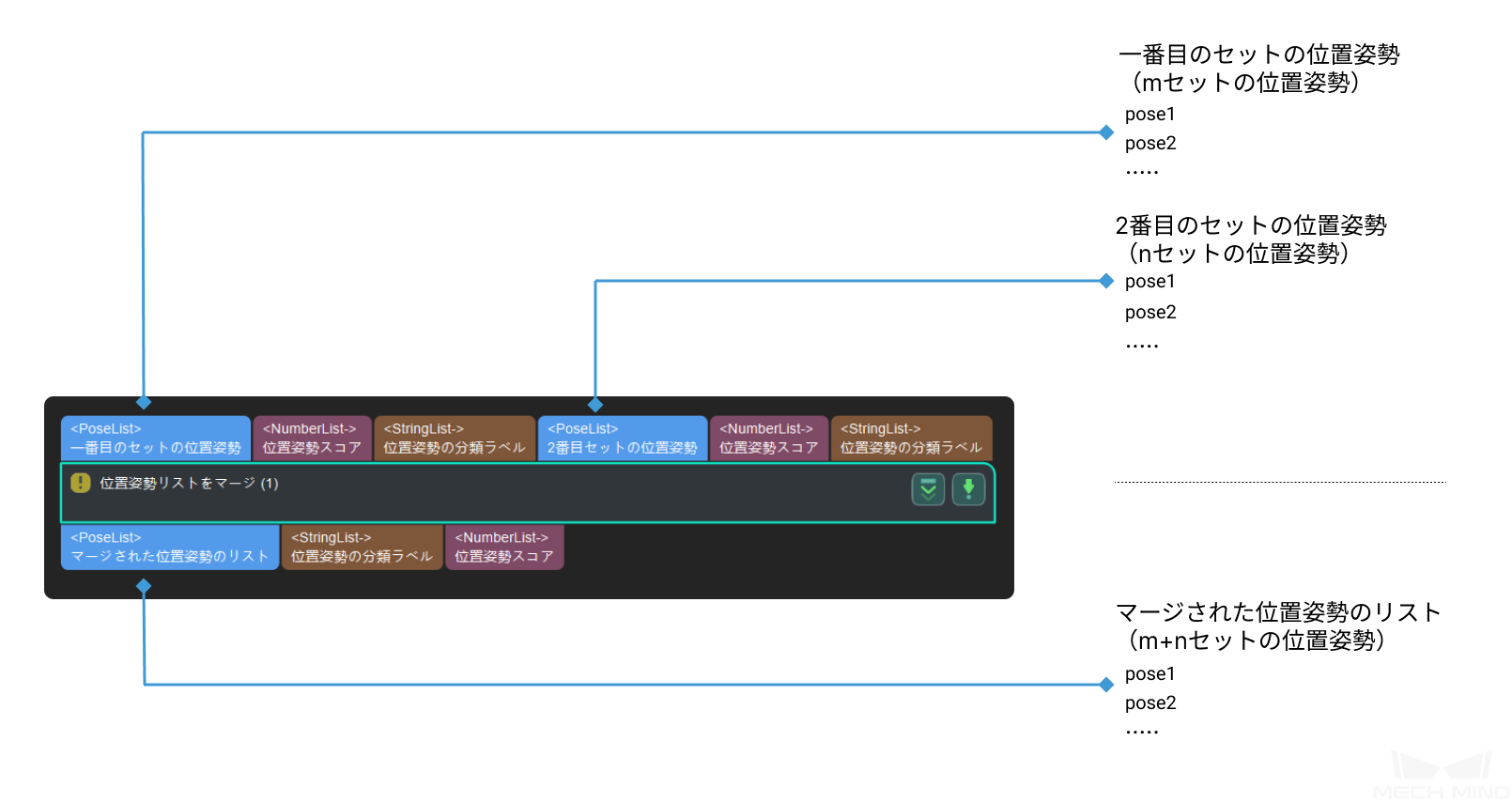
このステップは古いバージョンであり、位置姿勢に関連するデータしかマージできず、他のタイプのデータを追加できません。代わりに新しいバージョンの データをマージ を使用してください。本ステップについての情報が必要な場合は、Mech-Mind株式会社(メールアドレス:docs@mech-mind.net)までお問い合わせください。
二つの位置姿勢リストを繋ぎ、一つのリストにします。
通常、位置姿勢データの構造の編集が必要なシーンに適用されます。