把持対象物の平面位置姿勢を取得¶
物流業界向けに、小包やコンベアの損傷を防ぐための 動的配置 パラメータ群を追加しました。 動的配置 パラメータ群は、対象物の高さに応じて、対象物を配置する際のロボットハンドの高さを決定し、以下のいずれかを回避することができます。
ロボットアームが対象物を配置するときの位置が高すぎて、高速で走行中のコンベア上で対象物が転がってしまうのです。
ロボットアームが対象物を配置する位置が低すぎるため、対象物がコンベアに衝突し、対象物が圧迫されて破損したり、コンベアが傷ついたりすることがあります。
通常、把持対象は平面空間にあります。対象物の高さを計算するときに平面位置姿勢を使用する必要があるため、 動的配置 のパラメータを使用する前に、把持対象物が配置されている平面の位置姿勢を取得する必要があります。
把持対象物が配置されている平面の位置姿勢を取得¶
把持対象物が配置されている平面の位置姿勢を取得する場合、プロジェクトを新規作成してパラメータを調整する必要があります。
プロジェクトの構築¶
Mech-Visionプロジェクトを開くか、新規作成します。
をクリックしてプロジェクトを新規作成します。
をクリックして物流のプロジェクトを開きます。
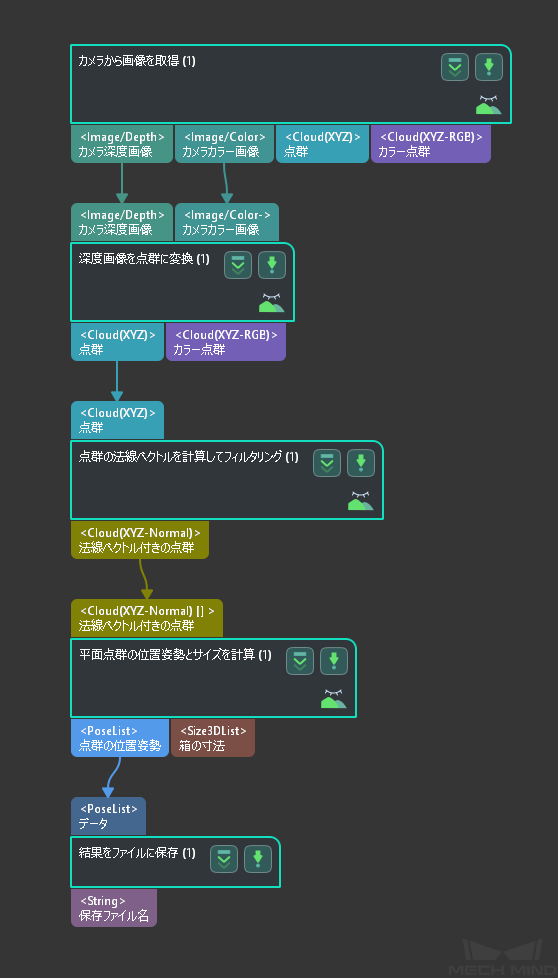
下図に示すように、ステップ カメラから画像を取得 > 深度画像を点群に変換 > 点群の法線ベクトルを計算してフィルタリング > 平面点群の位置姿勢とサイズを計算 > 結果をファイルに保存 を追加し、ポートをつなぎます。
カメラから画像を取得:ステップパラメータで カメラを選択 をクリックし、カメラを選択して接続します。
ヒント
シーンに対象物がないこと、カメラで取得した2D画像と深度画像が要件を満たしていることを確認します。
深度画像を点群に変換:ステップパラメータで 2D ROIを設定 をクリックし、関心領域を設定します。
ヒント
関心領域を設定するときは、中央の領域を選択するだけです。
平面点群の位置姿勢とサイズを計算: デバッグ結果出力 を有効にし、このステップの可視化機能を有効にして、生成された点群の位置姿勢を確認します。
結果をファイルに保存:ステップパラメータで ファイル名接頭辞 に名前を入力します。
把持対象物が配置されている平面の位置姿勢を生成¶
プロジェクトが構築したら、把持対象物が配置されている平面の位置姿勢を生成します。
実行 をクリックし、プロジェクト全体を実行します。
ステップ 平面点群の位置姿勢とサイズを計算 の可視化結果を確認します。
位置姿勢が点群中心にない場合、再撮影して点群を再取得する必要があります。
位置姿勢が点群中心にある場合、次の手順に進みます。
位置姿勢のファイルはプロジェクトディレクトリに生成され、生成後は自動的にそのフォルダが開かれます。
把持対象物が配置されている平面の位置姿勢を読み取る¶
ステップ ファイルから位置姿勢を読み取る を使用して生成された位置姿勢を読み取ります。
ヒント
把持位置姿勢を予測(V2) ステップを使用した物流プロジェクトでは、把持対象物が配置されている平面の位置姿勢を取得する場合、 カメラから画像を取得 以外のすべてのステップを削除する必要があります。