把持位置姿勢を予測(V2)¶
機能¶
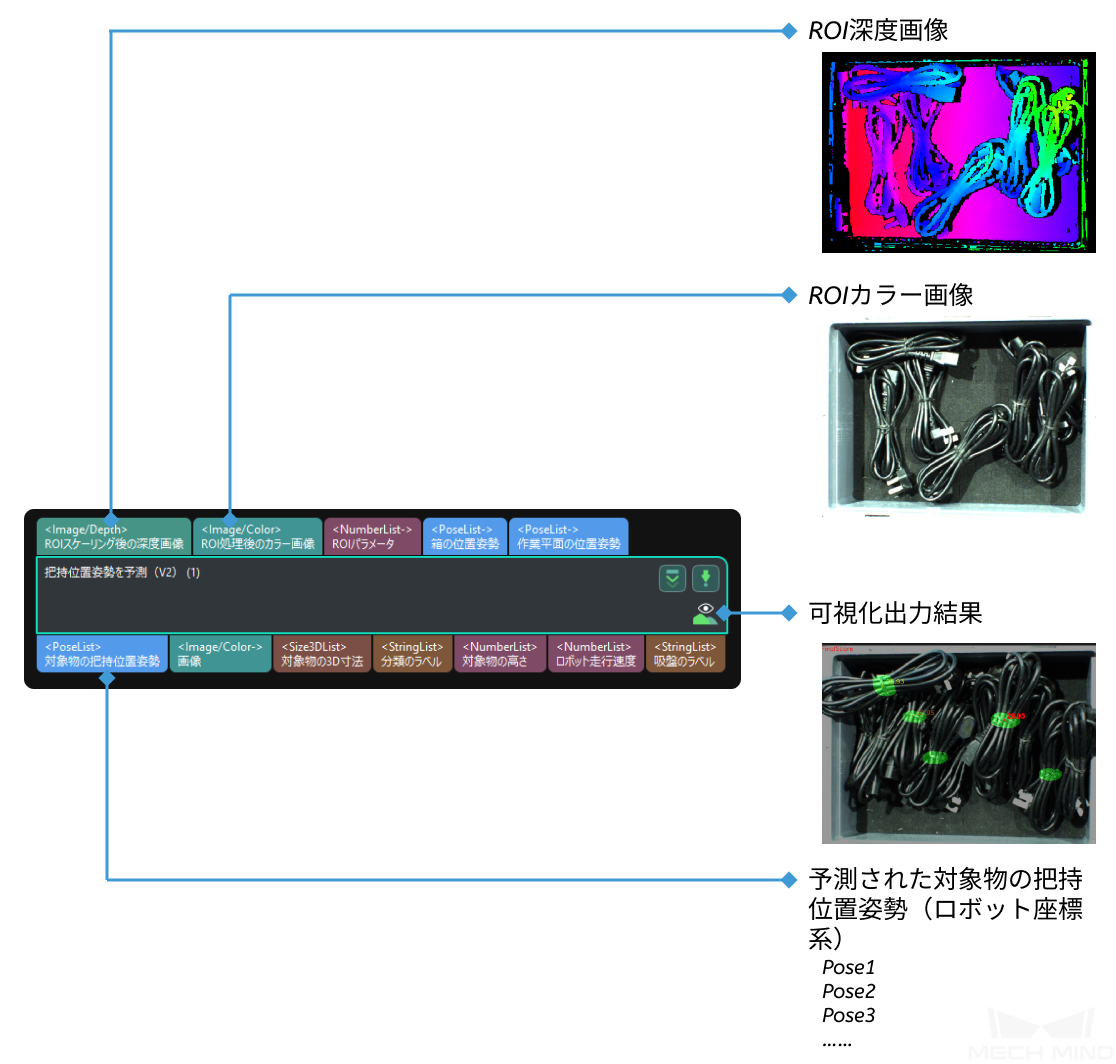
このステップは2D画像と深度画像から把持対象物を認識し、把持位置姿勢を出力できます。
注釈
このステップを使用する際に、ログバーに「ディープラーニングサーバーが正常に起動しました」というメッセージが表示されるのを待ってから、このステップを実行します。
このステップを初めて実行する前に、 把持の設定ファイル を追加する必要があります。読み込みに少し時間がかかりますので、しばらくお待ちください。
使用シーン¶
このステップは商品仕分けに使用され、物流、スーパーマーケット、ケーブル産業でよく使用されています。スケーリングされた深度画像、点群、ROI情報を取得するために、ステップ 2D ROI内の画像をスケーリング の後に使用されます。
入力と出力¶
パラメータの説明¶
サーバー
- サーバーIP
- パラメータ説明:このパラメータは、ディープラーニングサーバーのIPアドレスを設定するために使用されます。初期値:127.0.0.1調整説明:実際のニーズに応じて設定してください。
- サーバーポート(1-65535)
- パラメータ説明:このパラメータは、ディープラーニングサーバーのポート番号を設定するために使用されます。初期値:60054設定可能な範囲:60000~65535調整説明:実際のニーズに応じて設定してください。
把持設定
- 把持設定のフォルダパス
- パラメータ説明:このパラメータは、把持設定フォルダのパスを設定するために使用されます。調整説明:プロジェクトを実行する前に、シーンに応じて 把持設定のフォルダ を追加する必要があります。Mech-Mindは、物流(セマンティックセグメンテーション)、物流(対象物検出)、スーパーマーケット、ケーブル、薬の外箱の5つの把持設定フォルダを提供しています。詳細は下表に示します。必要な場合はMech-Mind株式会社にお問い合わせください。
使用シーン
把持設定のフォルダパス
物流業界(セマンティックセグメンテーション)
Logistics_Seg_RGBSuction
物流業界(対象物検出)
Logistics_OD_RGBSuction
スーパーマーケット業界
Supermarket_Seg_RGBSuction
ケーブル業界
Cable_Seg_RGBGrasp
薬の外箱
MedicineBox_Instance_3DSize_RGBSuction
注釈
把持の設定フォルダには、2つのJSONファイルと、1つのモデルが格納されているmodelフォルダがあります。パスを追加するときは、一番外側のフォルダを使用し、modelフォルダに選択する必要がありません。そうしないと、エラーが報告されます。
例えば:xxxx\Cable_Seg_RGBGraspのパスを選択します。
ヒント
ディープラーニングモデルの選び方を判断するには、ある程度のディープラーニングの知識が必要なので、ご利用の際はMech-Mind株式会社に問い合わせることをお勧めします。
- 物流業界(セマンティックセグメンテーション)
- 詳細については、 物流業界(セマンティックセグメンテーション)に適応可能なパラメータ をご参照ください。
- 物流業界(対象物検出)
- 詳細については、 物流業界(対象物検出)に適応可能なパラメータ をご参照ください。
- スーパーマーケット業界
- 詳細については、 スーパーマーケットに適応可能なパラメータ をご参照ください。
- ケーブル業界
- 詳細については、 ケーブルに適用可能なパラメータ をご参照ください。
- 薬の外箱
- 詳細については、 薬の外箱に適応可能なパラメータ をご参照ください。
注意
上記のシーンでモデルを使用する場合、GeForce GTX 10シリーズを推奨し、ビデオメモリは4G以上が必要です。このステップを初めて実行すると、グラフィックカードに応じてモデルが最適化され、その処理には15分から35分程度かかります。