対象物の把持範囲
本節では、対象物の把持範囲について説明します。
ロボットの把持位置姿勢は、一部の対象物を把持する際に、特定の角度範囲内で柔軟に調整することが可能で、これを把持範囲といいます。把持範囲を設定することで、ロボットはこの「ズレ許容差」を利用して、衝突や特異点などを回避することができます。
配置位置姿勢が「対象物の位置姿勢」に設定されている場合、ソフトウェアが把持範囲を適用した把持を行うときの実際の把持姿勢と配置姿勢の角度を自動的に記録します。配置する際に、ソフトウェアはこの角度に応じてツールの位置姿勢を調整し、ツールが正しい配置姿勢で配置されるようにします。
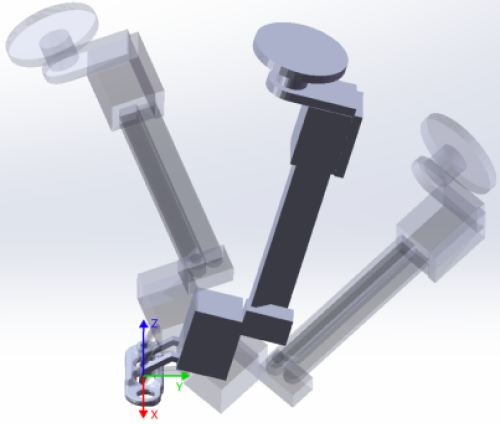
例えば、下図のようなシーンでは、ロボットハンドは対象物の位置姿勢のX軸を中心とした特定の角度範囲内で把持姿勢を柔軟に選択可能で、X軸ヲ基準軸とします。
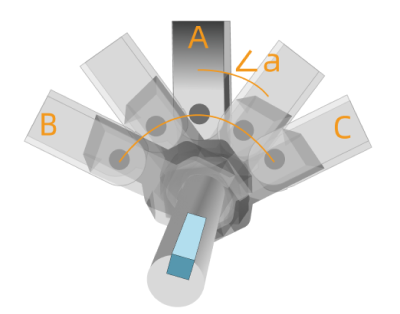
範囲とは、把持位置姿勢と視覚位置姿勢のずれの最大許容角度のことです。下図のBとCの間の角度が範囲となります。
試行ステップサイズとは、把持を計画する度数のことです。下図の∠aが試行間隔となります。
試行回数は、範囲と試行間隔によって自動的に計算されます。
例えば、試行間隔を5°、範囲を±10°とすると、片側範囲での試行回数は10/5=2、すなわち2回(5°と10°でそれぞれ試行)となり、合計試行回数は1+2*2=5回(-10°、-5°、0°、5°、10°)となります。