ロボットハンド¶
本節では、ロボットハンドとその関連設定について説明します。
概要¶
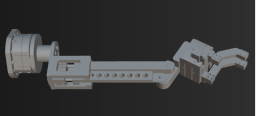
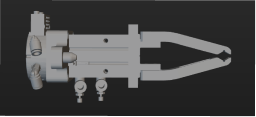
ロボットハンドとは、ロボットが作業を行うために特別に設計され、ロボットのフランジに取り付けられるグリッパーや吸盤などの装置です。
ロボットハンドモデル¶
3Dシミュレーションエリアにロボットハンドを表示し、衝突検出を行うためには、ロボットハンドの3Dモデルと衝突モデルを作成し、ソフトウェアのモデルライブラリにインポートする必要があります。
対応可能な形式は以下の通りです。
形式
STL
OBJ
DAE
Binvox
3Dモデル
√
√
√
×
衝突モデル
×
√
×
×
ヒント
ソフトウェアでは、ロボットハンドの衝突モデルが各パーツの凸多面体(凸包)のobjモデルである必要があります。 モデルエディタ を使用してロボットハンドモデルの凸多面体を構築し、obj形式に変換することができます。
3Dモデルは3Dシミュレーションエリアでの表示にのみ使用でき、衝突検出が有効になりません。衝突モデルは衝突検出にのみ使用でき、3Dシミュレーションエリアで表示されません。
ロボットハンドの対称性¶
ツールの対称性とは、ロボットハンドが自身の対称軸を中心に特定角度で回転し、回転前の形状と一致する能力のことです。ロボットハンドの対称性を設定することで、把持時や配置時の先端の回転を抑え、計画の成功率を高め、計画時間を短縮し、ロボットの動作をよりスムーズで高速にすることができます。
回転対称性無し
2回の回転対称
円対称(任意角度で回転対称)
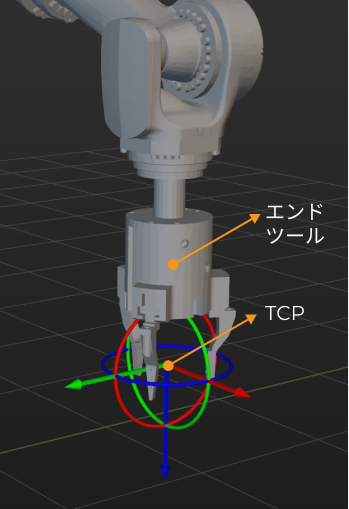
ツール中心点(TCP)¶
ロボットハンドは対象物を把持・配置するために使用されます。把持・配置のためにロボットを空間内のある位置に移動させる場合、実はTCPをその位置に移動させます。デフォルトのTCPはロボットの先端にあるので、実際の把持作業を正確にシミュレーションするには、ツール中心点(TCP)を先端に調整する必要があります。
ロボットハンドモデルの設定¶
ロボットハンドの衝突モデルと3Dモデルをインポート¶
の + をクリックし、表示される画面から衝突モデルと3Dモデルのファイルを選択して 開く をクリックします。
ロボットハンドの追加¶
の + をクリックし、ロボットハンドの設定画面に入ります。
ツール名 に、ツールの名前を付けて入力します。
衝突モデル を、衝突検出のためのロボットハンドモデルを設定します。
3Dモデル を、3Dシミュレーションエリアに表示するためのロボットハンドモデルを設定します。3Dモデルの位置とサイズが実際の状況と異なる場合は、 ロボットハンドモデルの位置やサイズを調整 を参照して設定します。
実際の状況に応じて 回転対称 を、 回転対称性無し 、 N回対称 または 円対称 に設定します。 N回対称 に設定した場合、 対称回数 の設定も必要です。
TCPを設定するには、次のいずれの方法を使用します。
TCPパラメータを変更
オイラー角や四元数のパラメータを変更します。
正確なTCP位置姿勢の値を使用
正確な位置姿勢の値がすでに他の方法で得られている場合は、位置姿勢編集ツールに貼り付けることができます。
最後に OK をクリックします。
必要に応じて、上記の手順を繰り返し、ロボットハンドを追加してください。
ロボットハンドの削除¶
ロボットハンドを削除するには、次のいずれの方法を使用します。
でロボットハンドの名前をクリックして Delete を押します。
でロボットハンドの名前を右クリックして、表示されるメニューで 削除 をクリックします。
ロボットハンドの変更¶
ロボットハンドの設定画面を開くには、次のいずれの方法を使用します。
でロボットハンドの名前をダブルクリックします。
で、ロボットハンドの名前を右クリックして、表示されるメニューで ロボットハンド設定 をクリックします。
実際の状況に応じて各パラメータを調整する必要があります。
OK をクリックします。
現在のロボットハンドに設定¶
ロボットハンドが1つだけ追加されている場合、このハンドが現在のロボットハンドになります。複数のロボットハンドを追加した場合、デフォルトでは最初に追加したロボットハンドが現在のロボットハンドとなります。
ロボットハンドを現在のロボットハンドに設定するには、 でロボットハンドを右クリックして、表示されるメニューで 現在のロボットハンドに設定 をクリックします。
ロボットハンドモデルの位置やサイズを調整¶
追加したロボットハンドモデルの位置が間違った場合、以下の手順を実行します。
でロボットハンドのモデルファイルをダブルクリックします。
3Dシミュレーションエリアにおけるロボットハンドモデルの位置は、表示されるモデル変換の編集画面で位置姿勢のパラメータを変更することで調整できます。
追加したロボットハンドのサイズが実際の状況と異なる場合は、以下の手順を実行します。
でロボットハンドのモデルファイルをダブルクリックします。
すると、モデル変換の編集画面が表示されます。
モデル全体のスケールを調整したい場合は、 スケール パラメータを調整します。
X、Y、Z方向をそれぞれ拡大・縮小したい場合、X、Y、Zに同じスケールを適用 にチェックを外してからX、Y、Z方向のスケールをそれぞれ入力します。