ハードウェアの接続¶
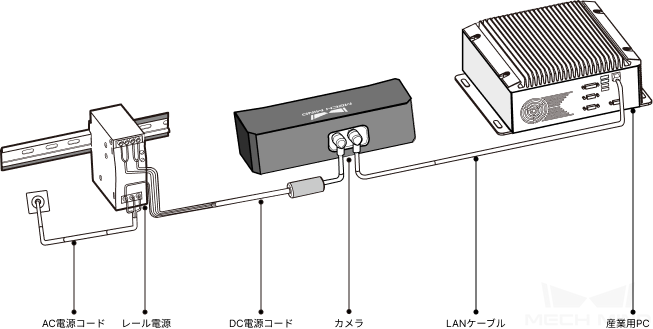
Mech-Mindビジョンシステムのハードウェア接続は、主に次のような構成になっています。
カメラの接続:
LANケーブルでカメラを産業用PCに接続します。
レール電源でカメラの電源を入れます。
産業用PCの接続:
LANケーブルで産業用PCをカメラに接続します。
電源アダプタで産業用PCの電源を入れます。
HDMIケーブルで産業用PCとモニターを接続します。HDMIケーブルとモニターはお客様でご用意ください。
ロボットコントローラの接続:
LANケーブルでロボットコントローラを産業用PCに接続します。LANケーブルはお客様でご用意ください。
電源アダプタでロボットコントローラの電源を入れます。

注意
接続するときは、最後に電源を入れてください。
カメラ、産業用PC、ロボットコントローラはLANケーブルで接続されています。LANポートが足りない場合は、ギガビットスイッチを使用して接続することができます。
ケーブルの外観は基本的に同じなので、接続する前にラベルで区別することをお勧めします。
カメラを接続¶
注意
Eye in Hand方式でカメラが取り付けられている場合、カメラの配線に注意が必要です。ロボットエンドの可動範囲が広いときにロボットのケーブルパックやカメラのケーブルに引っ張りがかかる場合、ロボットの正常な動作に影響を与えることなく、ソフトウェアでロボットエンドの可動範囲を設定することができます。
カメラの接続は2つの部分で構成されています。
LANケーブルでカメラを産業用PCに接続します。
レール電源でカメラの電源を入れます。
DC電源コードを接続¶
下図に示すように、DC電源コードはDC24V電源コネクタに差し込みます。
電源コードのプラグの突起をカメラの電源コネクタの穴に挿入します。
固定ナットをしっかり締めます。
ヒント
ナットを締めるときの推奨トルクは16N·mです。

カメラのLANケーブルを接続¶
LANケーブルの航空コネクタプラグは、ETHのLANポートに差し込みます。
航空コネクタプラグの突起をETHのLANポートに差し込みます。
固定ナットをしっかり締めます。
ヒント
ナットを締めるときの推奨トルクは16N·mです。
レール電源を接続¶
下図に示すように、レール電源の配線を接続する場合は、対応する入出力電圧端子にプラグを接続する必要があります。
AC電源コード接続用の3連端子プラグ(PE、N、L)をそれぞれ対応する220V入力端子(
、N、L)に差し込みます。
DC電源コードを接続します。
+Vを24V出力端子の+Vに接続します。
-Vを24V出力端子の-Vに接続します。
PEを220V入力端子

警告
レール電源の接地端子は必ず接地してください。
レール電源は、配電ボックスで使用する必要があります。また、レールまたはレールが接続されている配電ボックスは確実に接地する必要があります。
レール電源が複数ある場合は、一定の距離を置いて設置する必要があります。
産業用PCを接続¶
産業用PCの接続:
HDMIケーブルで産業用PCとモニターを接続します(お客様でご用意ください)。
LANケーブルで産業用PCをカメラに接続します。
電源アダプタで産業用PCの電源を入れます。
ドングルを差し込みます。

ほかのものを接続¶
下図に示すように、電源アダプタの電源プラグを産業用PCの電源入力ポートに、ドングルをUSBポートに差し込みます。

ヒント
産業用PCのIPアドレスを設定するときは、LANケーブルを産業用PCのLANポートに接続します。
LANケーブルには、接続先を区別するためのラベルを貼ることをお勧めします。
ロボットコントローラを接続¶
両端にRJ45コネクタの付いたケーブルを用意し、その一端をロボットコントローラのLANポートに差し込みます。その後、ロボットコントローラの電源を入れます。詳細については、ロボット取扱説明書をご参照ください。

ヒント
ケーブルはお客様でご用意ください。