Others¶
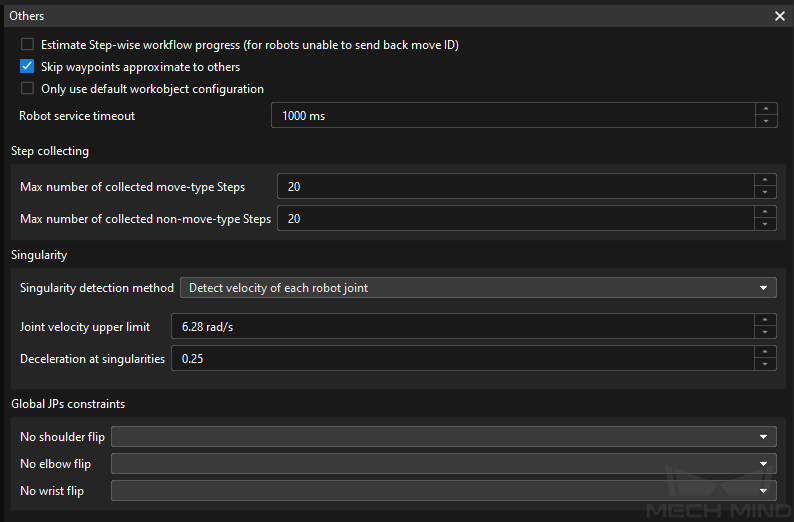
In this panel, you can configure settings related to operation, step collection, singularity, global JPs constraint, etc.
Others¶
- Only use default workobject configuration
After this option is enabled, the default workobject configurations will be used even when an object label is received.
- Robot service timeout
The timeout period for communication between Mech-Viz and the robot. The default timeout period is 1000 ms.
Step collecting¶
- Max number of collected move-type Steps
The maximum number of the move-type Steps in a project. If the number of move-type Steps exceeds the limit, Mech-Viz will fail to plan the path.
- Max number of collected non-move-type Steps
The maximum number of the non-move Steps in a project. If the number of non-move Steps exceeds the limit, Mech-Viz will fail to plan the path.
Singularity¶
If the robot reaches the point of a singularity, it may not be able to execute certain commands to move in a straight line. In order to avoid singularities in the planned path, singularity detection should be enabled.
Singularity detection method:
Detect the velocity of each joint of the robot
In this mode, you need to set the maximum joint velocity and velocity decelerate ratio to filter plan results that may cause singularities.
- Joint velocity upper limit
When the joint velocity exceeds the value, Mech-Viz will assume that a singularity occurs.
- Deceleration at singularities
When the deceleration exceeds this value, Mech-Viz will assume that a singularity occurs.
Deceleration = reduced speed (or acceleration) / set original speed (or acceleration)
Detect angle of a robot joint
In this mode, you need to set the joint and its bound of angle to filter plan results that may cause singularities.
- Select joint
Select a joint of the robot.
- Angle lower bound
When the bound of angle is lower than this value, Mech-Viz will assume that a singularity occurs.
- Angle upper bound
When the bound of angle is higher than this value, Mech-Viz will assume that a singularity occurs.
Global JPs Constraints¶
Note
For move-type Steps, if the Jps Constraint parameters are set to Auto, the settings here will take effect. Otherwise, the settings in the move-type Steps will take effect.
- No shoulder flip/No elbow flip/No wrist Flip
You can choose to reduce unnecessary rotation of the robot While Holding objects or during the Entire Execution.
However, setting the shoulder/elbow/wrist all to “no rotation” is not necessarily the best choice. An example is shown in the figure below.
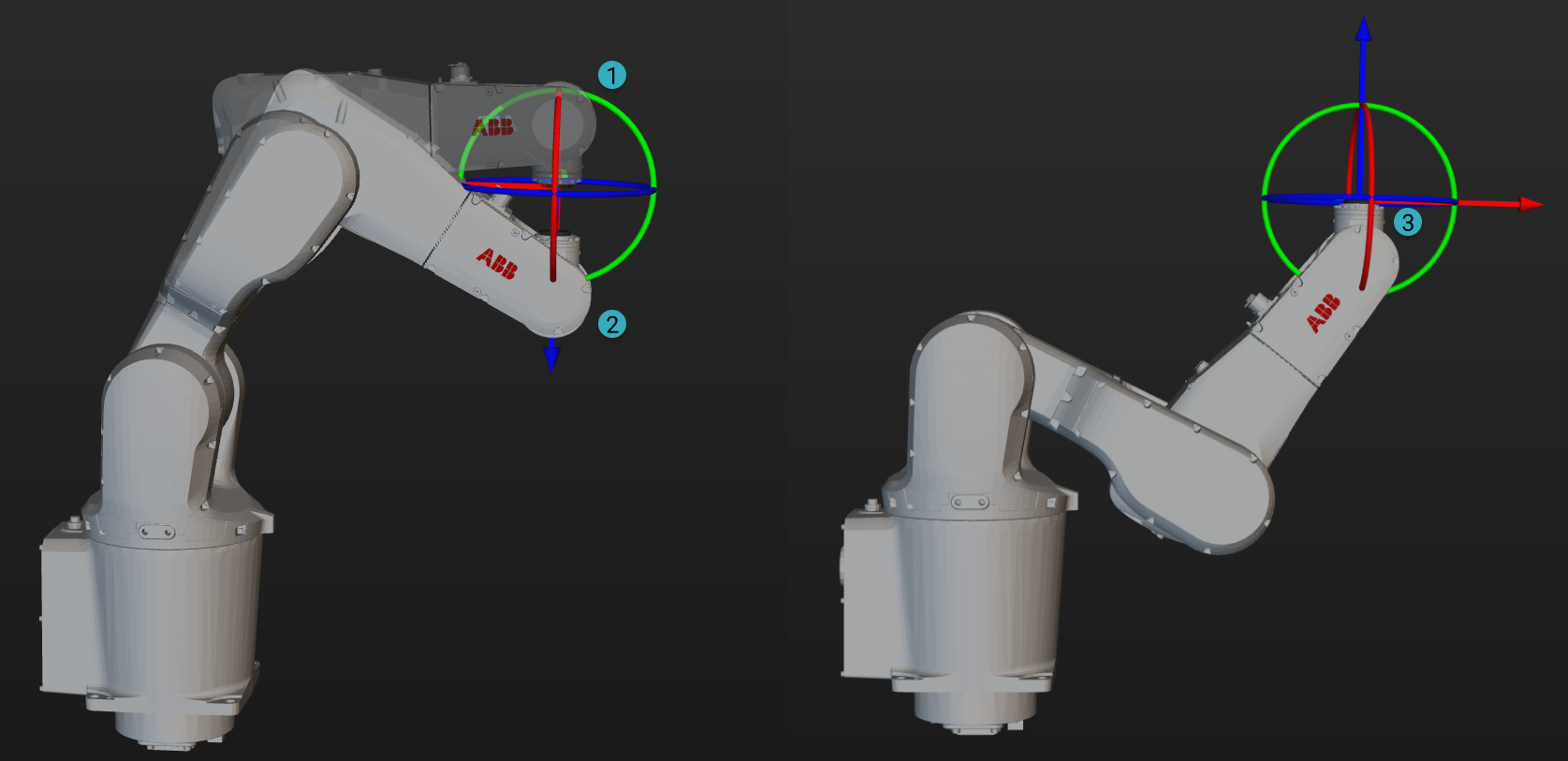
When the robot needs to move from position 1 to position 2 and “No Joint Flip” is set, unnecessary motion is required to reach that point, and the robot may end in position 3. In this case, only No Shoulder Flip and No Elbow Flip need to be set.