내부 파라미터 도구
이 도구는 카메라의 내부 파라미터 검사, 내부 파라미터 보정 및 출하 시 내부 파라미터로 리셋하는 데 사용됩니다. 내부 파라미터가 정확해야 계산된 각 포인트의 좌표의 정확성을 확보할 수 있습니다.
사전 준비
내부 파라미터를 검사하기 전에 카메라에 부착된 캘리브레이션 보드를 미리 준비해 두십시오.
-
캘리브레이션 보드를 카메라의 FOV 내에 배치하고 카메라의 추천 작업 거리 내에 있고 카메라의 중심 축에 수직인지 확인합니다.

-
캘리브레이션 보드의 2D 이미지와 뎁스 맵을 획득합니다. 캡처된 2D 이미지와 뎁스 맵은 다음과 같은 요구 사항을 충족해야 합니다.
-
캘리브레이션 보드에 원이 있는 부분의 캡처가 완전합니다.
-
2D 이미지는 너무 밝거나 어둡지 않으며 캘리브레이션 보드의 원은 선명하고 완전합니다.
-
뎁스 맵 중의 캘리브레이션 보드에 있는 원이 완전합니다.
-
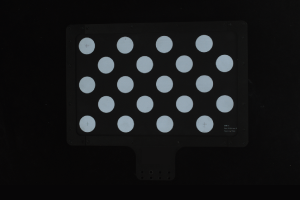
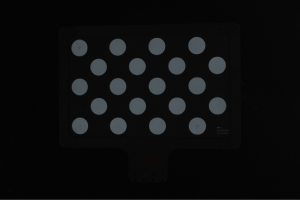
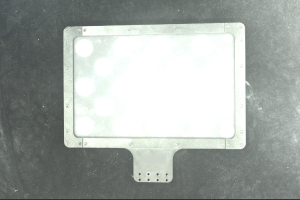
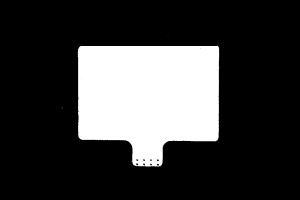
캘리브레이션 보드의 2D 이미지 예시는 아래와 같습니다.
| 이미지가 매우 어두워서 캘리브레이션 보드에 있는 원을 명확하게 식별할 수 없습니다. | 캘리브레이션 보드에 있는 원이 완전하고 가장자리가 뚜렷하게 보입니다. | 이미지가 매우 밝아서 캘리브레이션 보드에 있는 원을 명확하게 식별할 수 없습니다. | |
|---|---|---|---|
|
|
|
|

캡처된 2D 이미지는 요구 사항을 충족할 수 없으면 2D 이미지 파라미터를 조정하십시오.
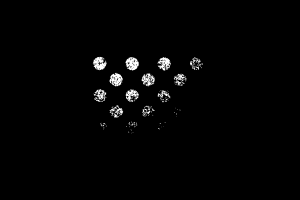
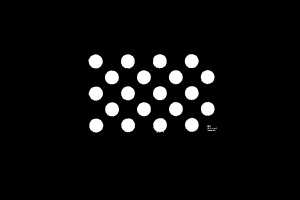
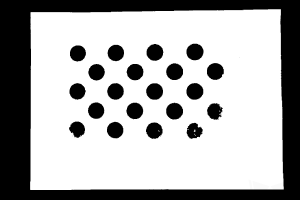
캘리브레이션 보드의 뎁스 맵 예시는 아래와 같습니다.
| 노출 시간이 매우 짧아서 캘리브레이션 보드에 있는 원이 불완전합니다. | 캘리브레이션 보드에 있는 원 또는 캘리브레이션 보드 전체가 완전하고 누락된 부분이 없습니다. | 노출 시간이 매우 길어서 캘리브레이션 보드에 있는 원의 일부 또는 전체가 누락됩니다. | |
|---|---|---|---|
|
|
|
|
캡처된 뎁스 맵은 요구 사항을 충족할 수 없으면 뎁스 맵 파라미터를 조정하십시오.
내부 파라미터 검사
메뉴 바의 툴에서 내부 파라미터 도구를 클릭하여 내부 파라미터 도구를 엽니다.
내부 파라미터 도구를 사용하여 카메라의 내부 파라미터를 검사할 때 다음과 같이 작업합니다.
-
1. 캘리브레이션 보드 배치 및 이미지 품질 확인 중의 이미지 캡처 버튼을 클릭하여 캘리브레이션 보드의 2D 이미지와 뎁스 맵을 획득합니다. 이미지는 요구 사항을 충족할 수 있는지를 확인합니다.
-
2. 캘리브레이션 보드 선택에서 캘리브레이션 보드의 사양을 설정합니다.
-
표준 캘리브레이션 보드를 사용하려면 오른쪽 작은 삼각형 아이콘을 클릭하여 캘리브레이션 보드의 사양을 선택합니다.
-
맞춤형 캘리브레이션 보드를 사용하려면 맞춤형 버튼을 클릭한 후 구체적인 정보에 근거하여 모델, 행, 열 및 간격을 설정합니다.
-
-
3. 내부 파라미터 검사에서 내부 파라미터 검사를 클릭하여 카메라 내부 파라미터를 검사합니다. 검사 과정이 끝나면 검사 결과를 표시하는 팝업 창이 나옵니다.
| 오류 메시지가 나타나면 다음 섹션의 내용에 따라 문제를 해결하십시오. |
내부 파라미터 검사 관련 문제 해결
내부 파라미터를 검사할 때 다음과 같은 문제들이 발생할 수 있습니다.
캘리브레이션 보드에 있는 원이 감지되지 않음
문제 설명:
내부 파라미터 검사 결과의 팝업창에 ‘캘리브레이션 보드에 있는 원이 감지되지 않았습니다.’라는 메시지가 표시됩니다.
해결 방법:
다음 해결 방법을 시도하십시오.
-
캘리브레이션 보드의 모델과 사양이 맞는지 확인하십시오.
-
틀린 경우 정확한 캘리브레이션 보드의 모델이나 사양을 입력하십시오. 다음에 카메라 내부 파라미터를 다시 검사하십시오.
-
캘리브레이션 보드가 맞으면 다음 방법을 시도해 보십시오.
-
-
2D 이미지와 뎁스 맵의 요구 사항을 참조하여 2D 이미지와 뎁스 맵이 요구 사항을 충족할 수 있는지를 확인하십시오.
-
2D 이미지는 요구 사항을 충족할 수 없는 경우 2D 이미지 파라미터를 조정하고 뎁스 맵은 요구 사항을 충족할 수 없는 경우 뎁스 맵과 관련된 파라미터를 조정하십시오. 다음에 카메라 내부 파라미터를 다시 검사하십시오.
-
이미지가 요구 사항을 모두 충족하면 다음 단계를 수행하십시오.
-
-
또는 검사를 돕기 위해 보조원을 그리기 가능을 사용할 수 있습니다. 상세한 작업 설명은 보조원을 그리기 내용을 참조하십시오.
-
3. 내부 파라미터 검사에서 내부 파라미터를 검사하기 버튼을 클릭하여 내부 파라미터를 다시 검사하십시오.
-
내부 파라미터 검사가 성공하면 프로세스가 종료됩니다.
-
‘캘리브레이션 보드에 있는 원이 감지되지 않았습니다.’ 라는 메시지가 또 나타나면 다음 방법을 시도하십시오.
-
-
특징 감지 파라미터를 편집하기 가능을 사용하여 다시 감지합니다. 상세한 작업 설명은 특징 감지 파라미터를 편집하기 내용을 참조하십시오.
-
3. 내부 파라미터 검사에서 내부 파라미터를 검사하기 버튼을 클릭하여 내부 파라미터를 다시 검사하십시오.
-
내부 파라미터 검사가 성공하면 프로세스가 종료됩니다.
-
‘캘리브레이션 보드에 있는 원이 감지되지 않았습니다.’ 라는 메시지가 여전히 나타나면 당사 기술 서포트팀에게 문의하십시오.
-
뎁스 맵에서 유효한 특징점을 찾지 못함
문제 설명:
내부 파라미터 검사 결과의 팝업창에 ‘뎁스 맵에서 유효한 특징점을 찾지 못했습니다.’ 라는 메시지가 표시됩니다.
해결 방법:
2D 이미지와 뎁스 맵의 요구 사항을 참조하여 뎁스 맵이 요구 사항을 충족할 수 있는지를 확인하십시오.
-
뎁스 맵은 요구 사항을 충족할 수 없으면 뎁스 맵 파라미터를 조절하십시오. 다음에 카메라 내부 파라미터를 다시 검사하십시오.
-
뎁스 맵은 요구 사항을 충족한 경우 당사 기술 서포트팀에게 문의하십시오.
보조 기능
내부 파라미터 도구에서는 일반적인 문제 해결을 돕기 위해 다음 기능을 제공합니다.
내부 파라미터 보정
이 기능은 내부 파라미터 오차가 매우 큰 문제를 해결하는 데 도움이 될 수 있습니다. 내부 파라미터 검사 결과 중의 스칼라 차이 값이 다음 수치보다 클 경우, 내부 파라미터의 오차가 큰 것으로 간주되며 내부 파라미터 보정 기능을 사용할 수 있습니다.
| 모델 | 스칼라 차이 값 |
|---|---|
DEEP, Log S, Log M |
0.6% |
LSR L |
0.5% |
기타 모델 |
0.3% |
주의: UHP 시리즈는 내부 파라미터 보정 기능을 사용할 수 없습니다. 내부 파라미터 오차가 매우 큰 경우 기술 서포트팀에게 문의하십시오.
내부 파라미터 보정 기능을 사용하면 다음 요구 사항에 따라 캘리브레이션 보드를 배치해야 합니다.
-
캘리브레이션 보드가 카메라의 중심 축에 수직되어야 합니다.
-
높이가 서로 다른 위치에 캘리브레이션 보드를 배치해야 합니다.
-
대상물의 윗면
-
대상물의 밑면
예를 들어 트레이에서 대상물을 피킹하거나 (디)팔레타이징 응용에서 캘리브레이션 보드를 트레이 또는 파렛트의 윗면과 밑면에 배치해야 합니다.
-
-
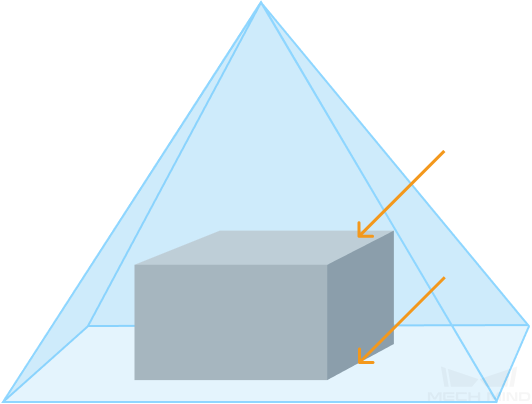
위의 두 높이에서 대상물의 중앙과 네 모서리에 있는 캘리브레이션 보드의 5개 세트의 데이터를 획득합니다.
 : 카메라 FOV
: 카메라 FOV : 대상물
: 대상물 -
대상 물체의 크기가 카메라의 최대 FOV에 가까운 경우 캘리브레이션 보드를 FOV 가장자리에 가까이 두지 마십시오. 캘리브레이션 보드의 외부 가장자리와 카메라 FOV 가장자리 사이의 거리는 FOV 길이 또는 너비의 최소 1/5이 되는 것이 좋습니다.
 : 카메라 FOV: 대상물
: 카메라 FOV: 대상물
내부 파라미터 보정 기능을 사용하려면 다음과 같이 작업하십시오.
-
위 설명에 따라 캘리브레이션 보드를 배치합니다.
-
내부 파라미터 보정 버튼을 클릭하고 데이터 획득 버튼을 클릭하십시오.
-
캘리브레이션 보드의 위치를 조정하고 데이터 획득 버튼을 다시 클릭하십시오.
-
위의 요구 사항에 따라 최소 10세트의 데이터를 획득한 후 내부 파라미터 보정 버튼을 클릭하십시오. 보정 성공 여부의 팝업 창이 자동으로 나옵니다.
보조원을 그리기
이 기능은 캘리브레이션 보드에 있는 원이 감지되지 않은 문제를 해결하는 데 도움이 될 수 있습니다.
보조원을 그리기 기능을 사용하려면 다음과 같이 작업하십시오.
-
3. 내부 파라미터 검사의 보조원을 그리기 버튼을 클릭하십시오.
-
2D 이미지에서 캘리브레이션 보드에 있는 완전한 원을 찾습니다. 마우스 커서를 원의 중심으로 이동하고 Ctrl 키를 누른 상태에서 마우스 왼쪽 버튼을 클릭한 후 커서를 위 또는 아래로 이동하여 보조원의 크기를 조정합니다. 다시 클릭하면 원 그리기가 완료됩니다.
-
보조원을 하나만 그리고 캘리브레이션 보드에 있는 원의 가장자리에 최대한 밀착시켜야 합니다.
-
보조원을 다시 그려야 하면 보조원을 그리기 버튼을 다시 클릭하십시오.
-
2D 이미지 위로 커서를 이동하고 마우스 휠을 조정하여 2D 이미지를 확대하거나 축소할 수 있습니다.
-
특징 감지 파라미터를 편집하기(고급)
이 기능은 캘리브레이션 보드에 있는 원이 감지되지 않은 문제를 해결하는 데 도움이 될 수 있습니다.
특징 감지 파라미터를 편집하기 가능을 사용하려면 다음과 같이 작업하십시오.
-
3. 내부 파라미터 검사에서 특징 감지 파라미터를 편집하기(고급) 버튼을 클릭하십시오.
-
실제 상황에 따라 특징 감지 파라미터를 편집하십시오.
-
캘리브레이션 보드에 있는 모든 원이 캡처되지 못하는 경우 일부 원의 손실을 허용 버튼을 클릭하고 새로 추가된 특징 감지 파라미터를 편잡하십시오.
-
3. 내부 파라미터 검사에서 내부 파라미터를 검사하기 버튼을 클릭하여 내부 파라미터를 다시 검사하십시오.