구조형 광 카메라의 작업 원리
Mech-Eye 산업용 3D 카메라(약칭: 3D 카메라)는 2D 카메라와 프로젝터로 구성된 구조형 광 3D 카메라입니다. 프로젝터는 특정한 패턴의 구조형 광을 물체 표면으로 투사하여 물체의 모양으로 인해 투사된 구조광 패턴도 달라집니다. 3D 카메라는 달라진 구조형 광의 패턴에 근거하여 물체의 뎁스 데이터를 계산합니다.
3D 카메라도 일반 2D 카메라와 마찬가지로 물체의 2D 맵을 획득할 수 있습니다.
3D 카메라의 완전한 작업 프로세스는 이미지 캡처, 계산 및 처리, 출력의 세 단계로 나눌 수 있습니다.
이미지 캡처
Mech-Eye SDK를 사용하여 3D 카메라를 트리거하고 이미지를 캡처합니다. 구체적으로 다음과 같습니다.
-
프로젝터(아래 그림에 있는 P) 줄무늬 모양의 빛을 대상 물체의 표면으로 투사하고 물체의 구조와 모양이 다르기 때문에 투사된 줄무늬의 모양도 달라집니다.
-
2D 카메라(아래 그림에 있는 C)로 캡처하고 모양이 달라진 줄무늬가 포함된 이미지를 생성합니다.
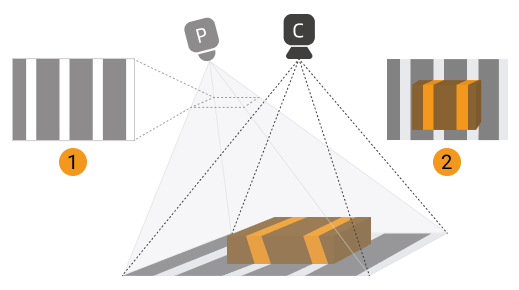
동시에 3D 카메라는 구조형 광으로 투사되지 않은 물체의 일반 2D 맵도 캡처합니다.