YASKAWA(야스카와) 프로그램 복제 프로세스 설명¶
이 부분에서는 다음 4개 단계를 포함한 YASKAWA 로봇을 Mech Viz로 컨트롤하는 방법을 소개합니다.
참고
시리즈가 다른 YASKAWA 로봇 티치펜더트의 작업 화면이 다릅니다. 이 부분에는 YRC1000을 예시로 설명하겠습니다.
컨트롤러 및 소프트웨어 버전 확인¶
컨트롤러:YRC1000(YRC1000 micro을 제외하고)및 DX200.
컨트롤러 및 소프트웨어 버전 확인:
YRC1000:특별한 요구가 없음.
DX200:DN2.25.00A(US/CN)-00 또는 이상 버전.
기능:개발한 마스터 컨트롤 프로그램을 로봇으로 복사하기 위해 로봇에서 MotoPlus 및 이더넷 기능을 활성화해야 합니다.
주의
시리즈가 다른 YASKAWA 로봇은 같은 마스터 컨트롤 파일을 사용할 수 없습니다.
네트워크 연결 설정¶
하드웨어 연결¶
YRC1000 시리즈의 컨트롤러를 사용하는 경우 IPC의 네트워크 케이블을 로봇 컨트롤러 CPU 기판의 LAN2 (CN106) 포트로 연결해야 하며 DX200 시리즈의 컨트롤러를 사용하는 경우 IPC의 네트워크 케이블을 로봇 컨트롤러 CPU 기판의 CN104포트로 연결해야 합니다.
참고
YRC1000 시리즈의 컨트롤러에 대하여:
LAN1 네트워크 포트는 티치펜더트와 연결되어야 하므로 IPC 네트워크 캐이블과 연결할 수 없습니다.
LAN2 포트에 이미 다른 장치와 연결된 경우에 IPC의 네트워크 캐이블을 LAN3 포트로 연결하십시오.
IP 설정¶
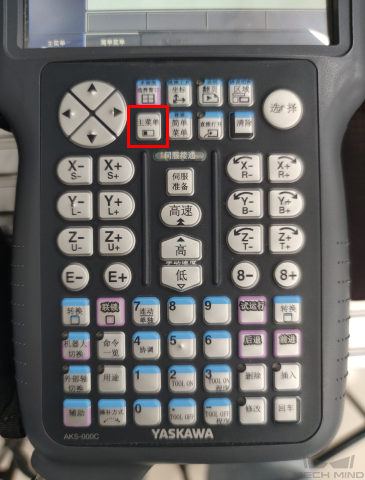
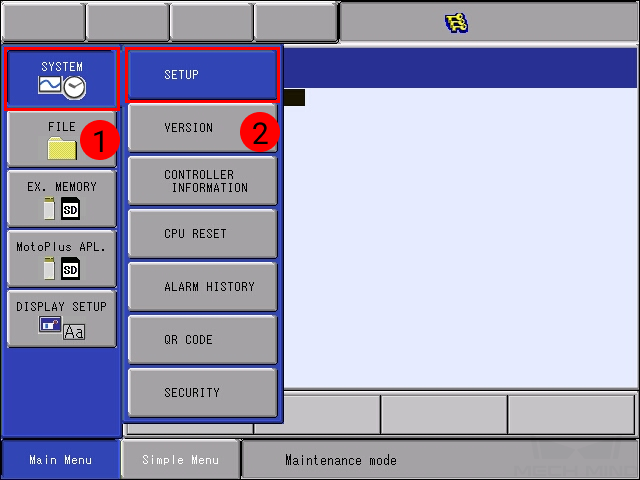
Main Menu 버튼을 눌러 전원을 켜고 유지 관리 모드(Maintenance mode)를 시작합니다.
주의
전원을 킬 때 Main Menu 버튼을 누르지 않으면 유지 관리 모드가 아닌 일반 모드 화면으로 들어갈 것입니다.
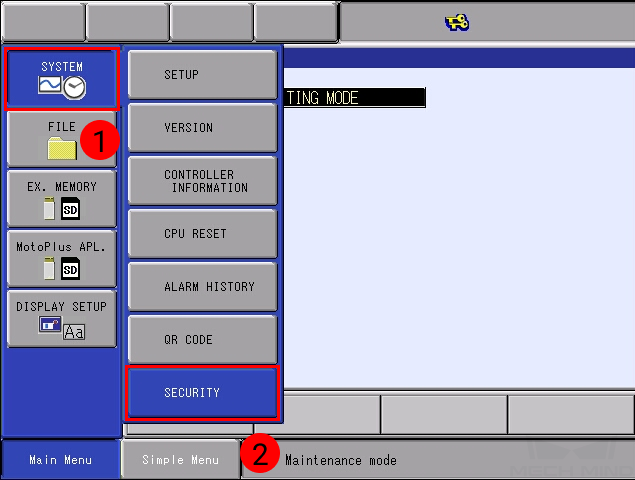
를 순서대로 클릭하여 MANAGEMENT MODE 를 선택하십시오.

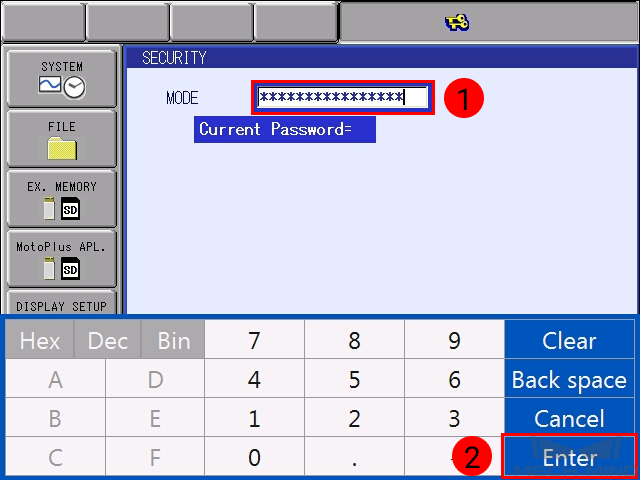
암호를 입력하십시오(기본 암호는 16개 《9》입니다).다음으로 Bace Space 버튼을 클릭하여 MANAGEMENT MODE 화면으로 들어갑니다.

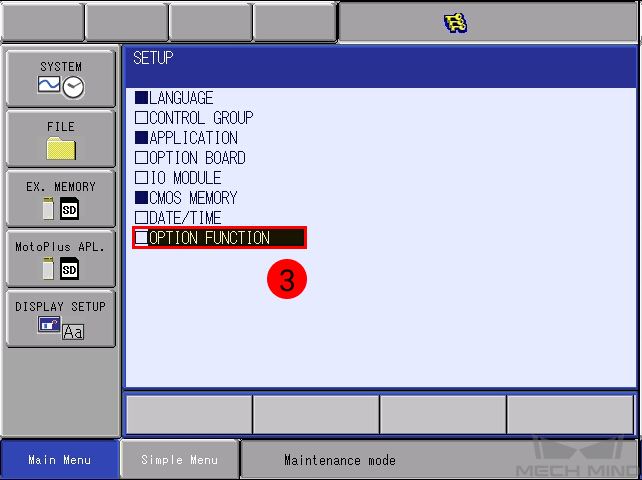
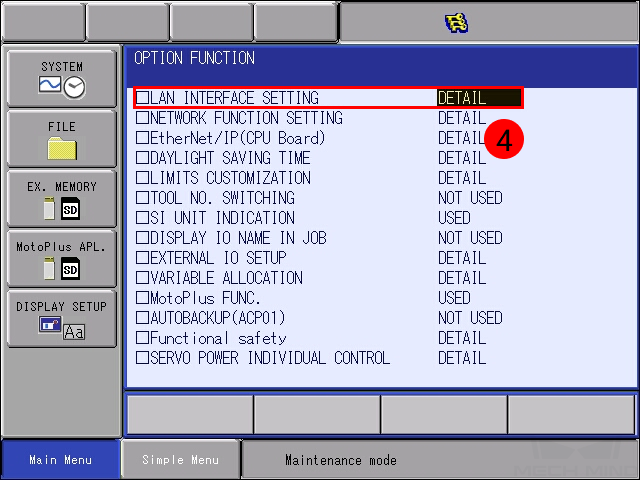
을 순서대로 클릭하고 옵션 기능 화면으로 들어간 후 LAN INTERFACE SETTING 을 클릭하여 LAN 인터페이스 설정 화면으로 들어갑니다.
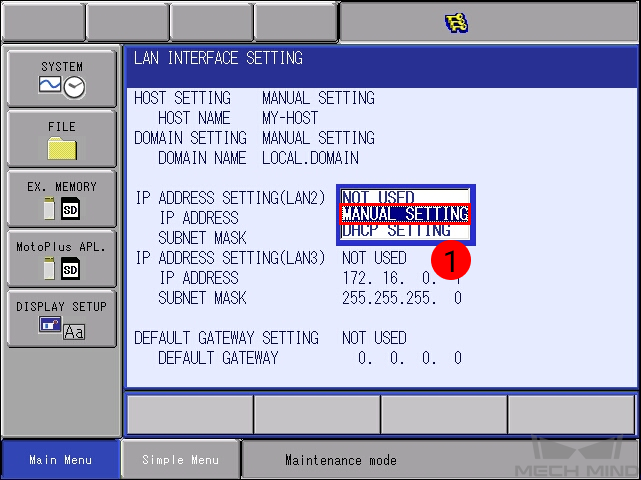
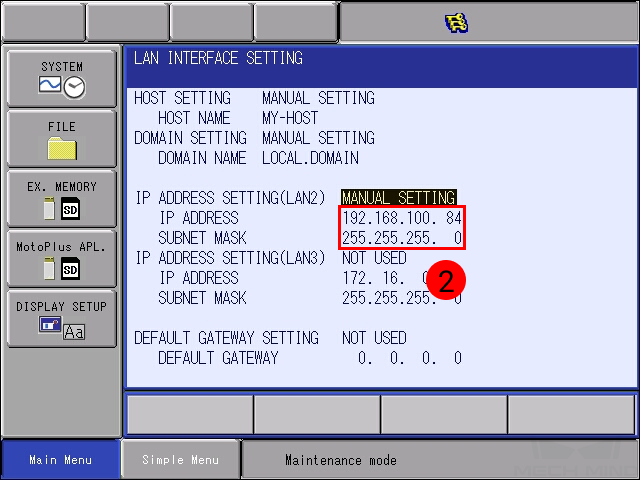
LAN2의 IP주소는 LAN2 인터페이스에서 설정해야 합니다. 풀다운 메뉴에서 MANUAL SETTING 을 선택하여 정확한 IP 주소 및 서브넷 마스크 를 설정하십시오.
주의
LAN2 인터페이스의 IP주소와 IPC의 IP주소는 동일한 네트워크 세그먼트에 있어야 합니다.
서브넷 마스크를 255.255.255.0으로 설정합니다.
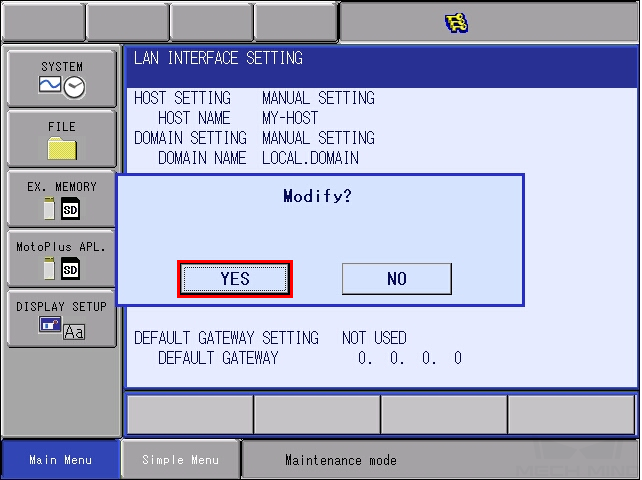
IP 주소를 설정한 다음에 티칭 머신 오른쪽 밑에 있는 ENTER 버튼을 눌러 팝업창에서 YES 를 선택하세요.
파일을 로봇에 복제하기¶
주의
로봇 프로그램을 복사하기 전에 포그라운드 프로그램을 백업해야 하는 경우 YASKAWA 로봇 《Operation Essentials-Common》의 7장을 참조하십시오.
사전 준비¶
Mech_RobServ 폴더에 있는 YASKAWA 로봇의 프로그램 복제 파일(YRC1000.out)을 USB의 루트 디렉터리로 복사합니다(파일 경로:
XXXX/Mech-Center-xxx/Robot_Server/Robot_FullControl/yaskawa).USB를 티치펜더트 뒷면에 있는 USB 포트로 꽂아 줍니다.
주의
USB에 복사된 프로그램 파일은 사용된 로봇 컨트롤러의 모델과 일치해야 합니다.
프로그램 복제 시작¶
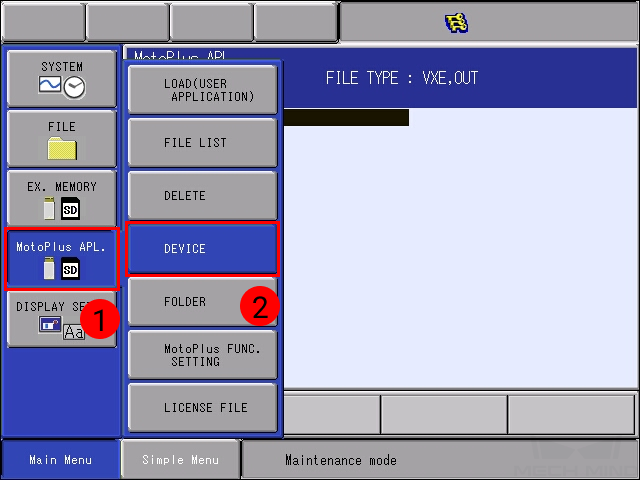
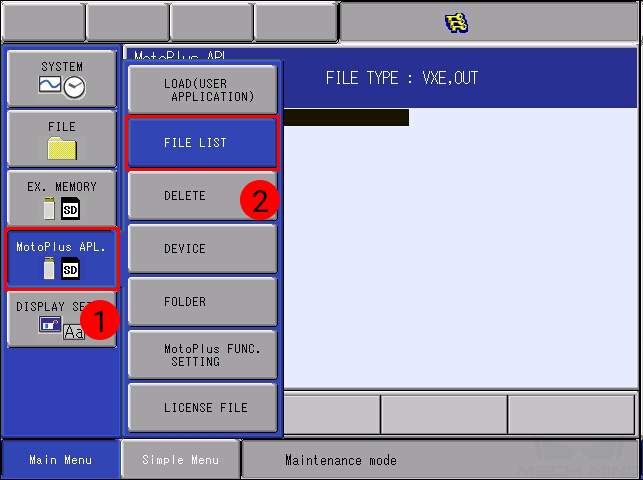
Maintenance mode 에서 를 클릭하세요.

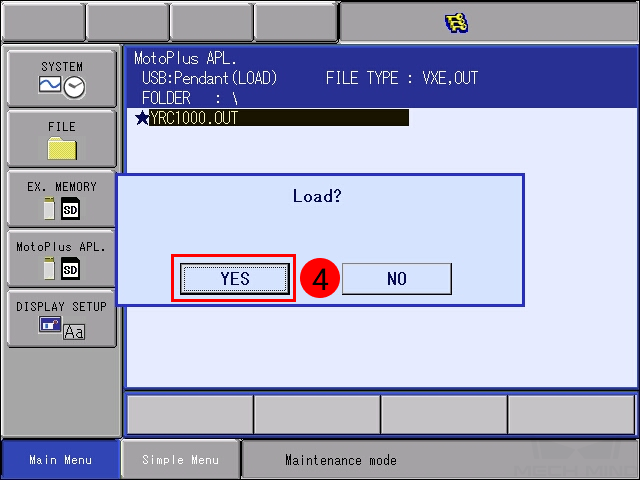
을 클릭하고 X.out 를 선택한 다음에 Back Space 버튼을 눌러 YES 를 클릭하면 됩니다.
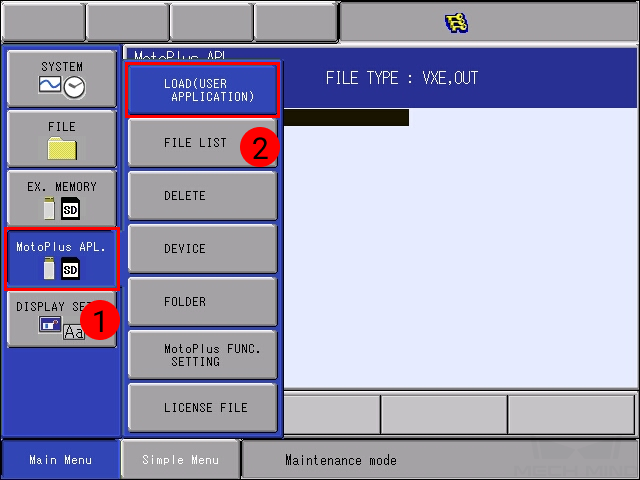

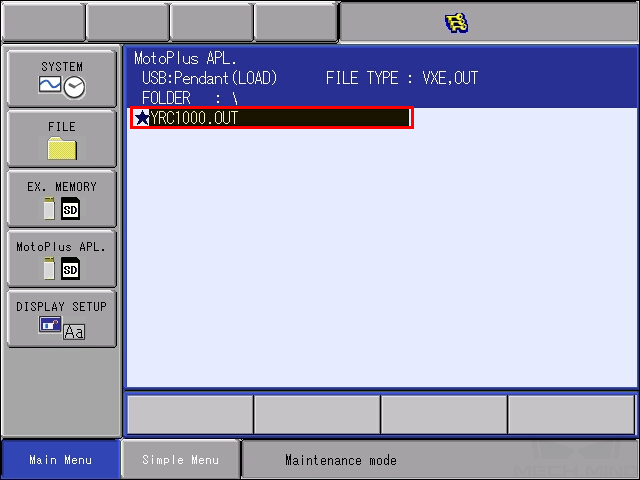
를 클릭하여 이미 로드된 파일을 볼 수 있습니다.
컨트롤러를 리부팅하고(이때 Main Menu 버튼을 누르지 마세요) 일반 모드 화면으로 들어가 YRC1000.out 파일이 백그라운드에서 자동 실행될 것입니다. 이때 키를 PLAY 로 돌려 Mech-Center 소프트웨어를 통해 로봇과 연결할 수 있습니다.

로봇 연결 상태 테스트¶
로봇 연결 상태 테스트 내용을 참조하세요.
로봇이 작동된 후 기본 속도(100%)로 빠르게 실행될 것이기 때문에 안전성을 위해 Mech-Viz 프로젝트를 실행하기 전에 적당한 속도를 설정해야 합니다.
힌트
속도 설정은 일반 모드에서 진행해야 합니다.
를 클릭하십시오.
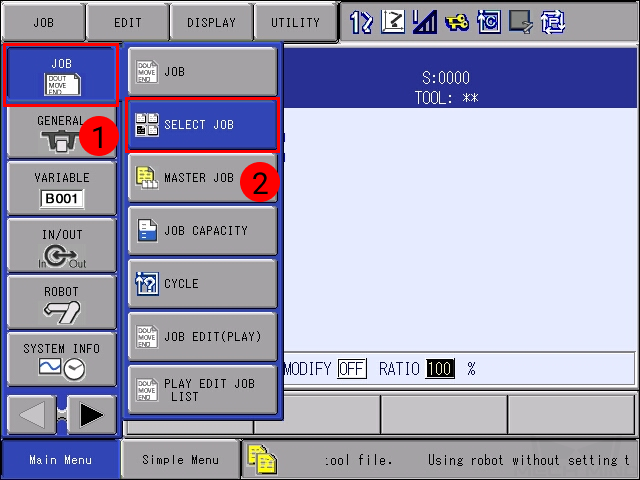
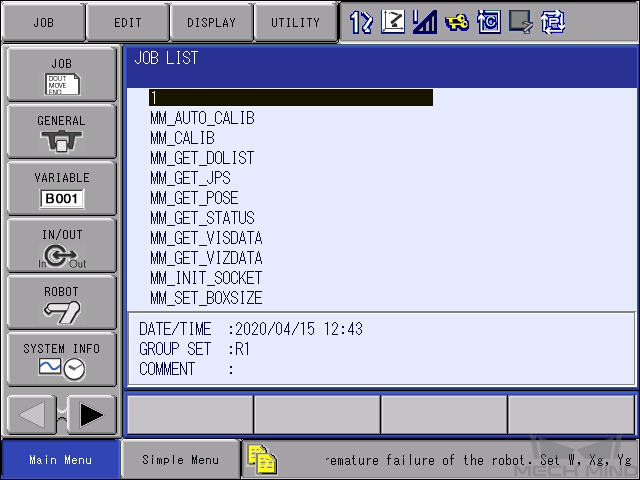
임의의 프로그램을 선택하고 티치펜더트에 있는 SELECT 버튼을 눌러 다음과 같은 화면으로 들어갑니다.
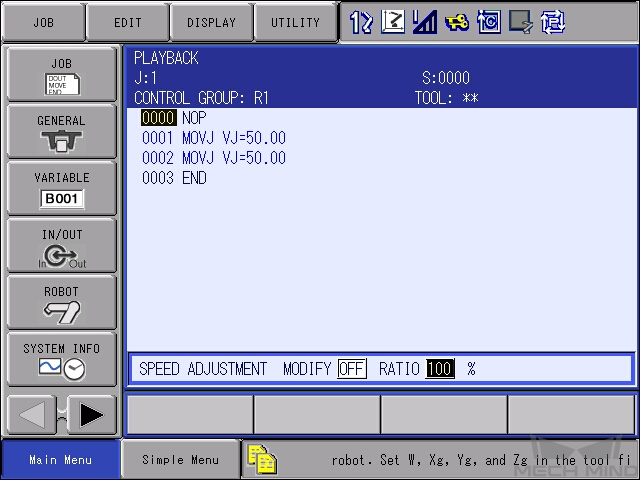
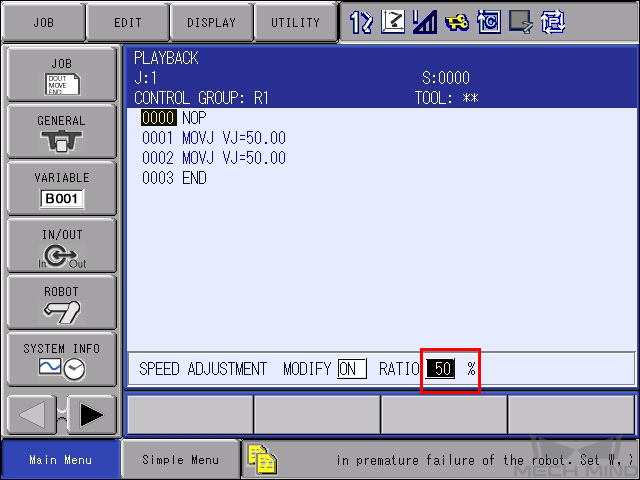
다음에 순서대로 를 클릭하여 속도 조정 화면에서 SPEED ADJUSTMENT 표시줄을 선택하세요.
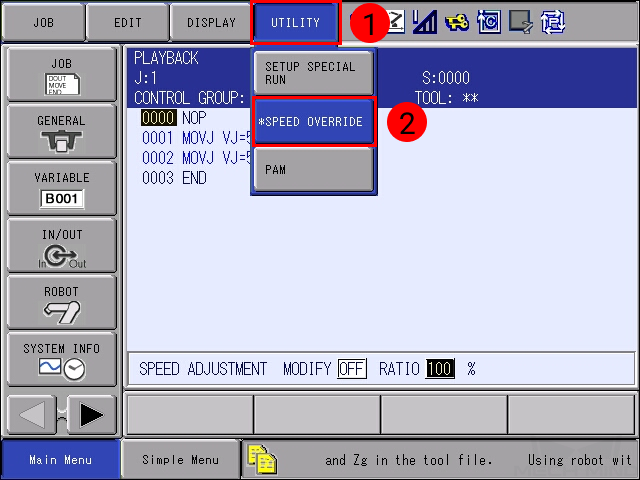

주의
SPEED ADJUSTMENT 표시줄을 선택하지 않으면 속도를 조정하는 파라미터를 설정할 수 없습니다.
SPEED ADJUSTMENT 표시줄에서 OFF 를 클릭하는 동시에 티치펜더트에 있는 SELECT 버튼을 눌러 ON 으로 전환할 수 있습니다.
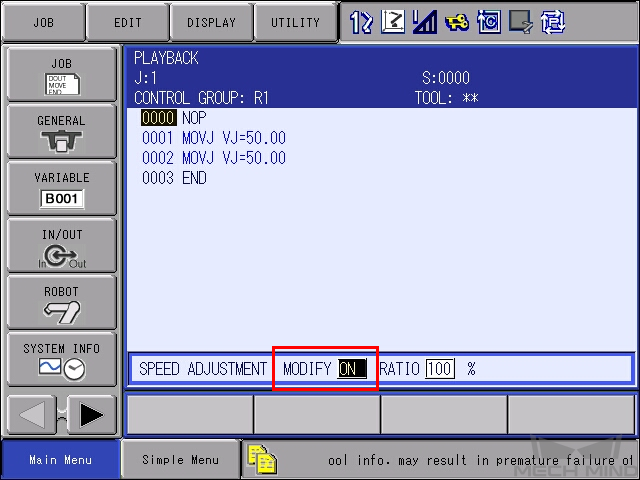
주의
OFF 를 ON 으로 전환하지 않으면 속도를 설정할 수 없습니다.
RATIO 뒤의 수치를 선택하여 티치펜더트에 있는 SELECT 버튼을 눌러 속도 수치 수정 화면으로 들어가 적당한 수치를 입력한 뒤 티치펜더트에 있는 Back Space 버튼을 눌러 속도 수정을 완료합니다.
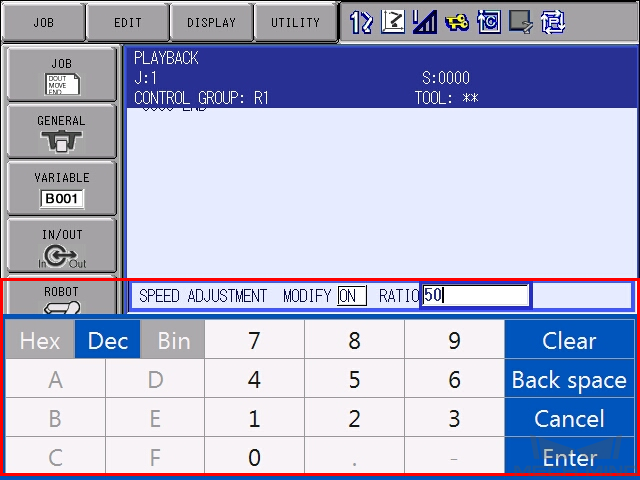
속도가 수정된 후의 화면은 아래 그림과 같습니다.