Hyundai (현대)¶
이 부분에서는 Mech Viz로 현대 로봇을 컨트롤하는 방법을 설명할 것입니다. 다음 5개 단계를 포함합니다.
컨트롤러 및 소프트웨어 버전 확인¶
로봇 컨트롤러 버전: 요구 사항 없음
네트워크 연결 설정¶
하드웨어 연결¶
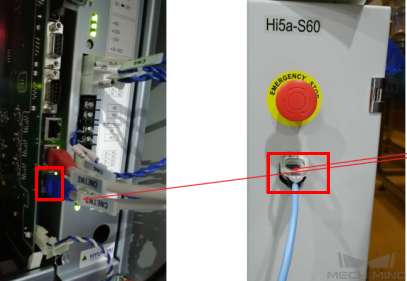
아래 그림과 같이 IPC의 네트워크 케이블을 컨트롤러 내부의 CNETN3 포트 또는 외부의 이더넷 포트에 연결합니다.
힌트
컨트롤러 내부에는 각각 티칭 머신의 EN0 주소, TP 주소 및 EN2 사용자 이더넷 주소에 해당하는 CNETN1, CNETN2 및 CNETN3 이 세 가지 포트가 있습니다. 네트워크 케이블은 CNETN3 포트에 연결해야 합니다.
IP 설정¶
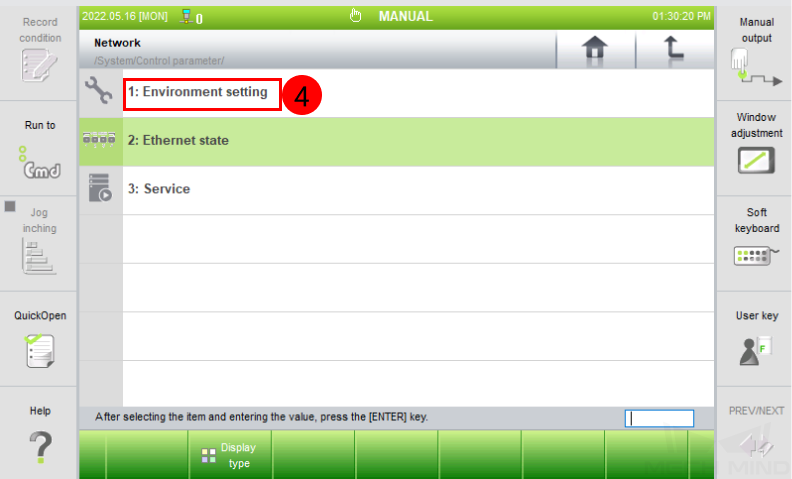
티치펜더트에서 을 클릭하여 환경 설정 화면으로 들어갑니다.

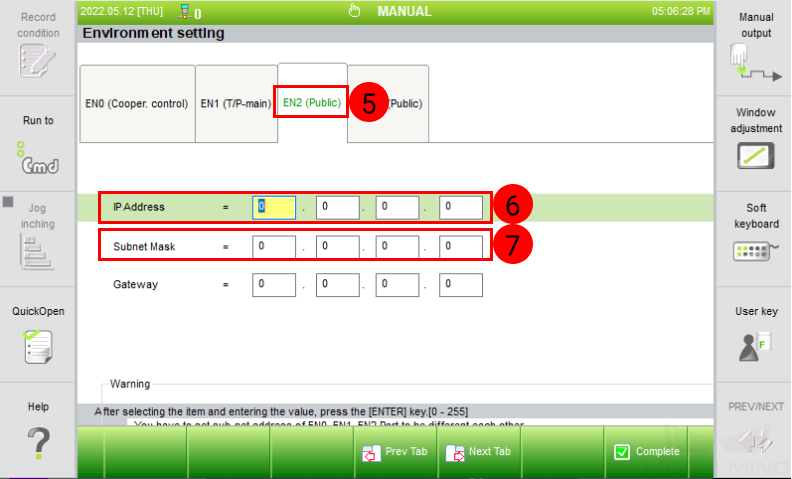
EN2 (Public) 로 전환하고 IP Address 에 IP 주소를 설정하며 서브넷 마스크 가 255.255.255.0인지 확인하십시오.
힌트
로봇 IP는 IPC와 동일한 서브넷에 있어야 합니다.
IPC의 서브넷 마스크는 로봇의 서브넷 마스크와 동일하며 255.255.255.0입니다.
IP 주소를 수정한 후 로봇을 다시 시작해야 합니다.
파일을 로봇에 복제하기¶
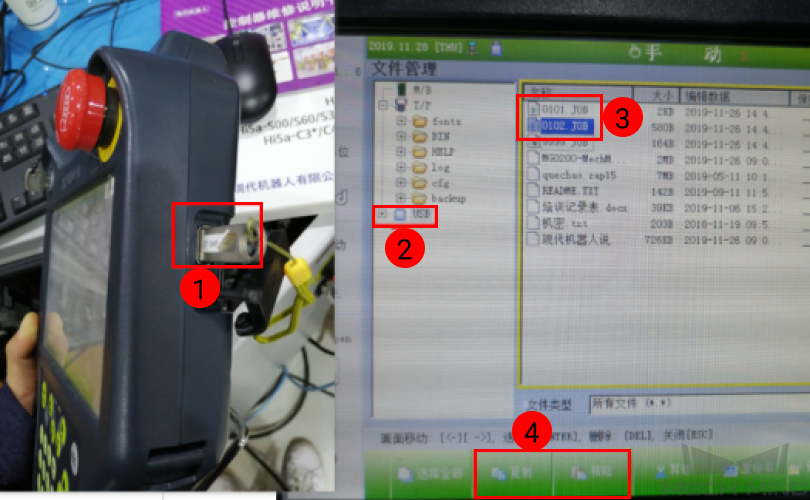
USB를 티치펜더트에 삽입합니다.
참고
현대 로봇을 컨트롤하려면 첫 번째 줄의 Program File Format Version 내용을 수정함으로써 풀 컨트롤(full-control) 프로그램 0101.JOB 및 0102.JOB 을 초기화해야 합니다.
힌트
로봇에 이미 사용 가능한 다른 프로그램이 있는 경우 단계5로 건너뛰십시오.
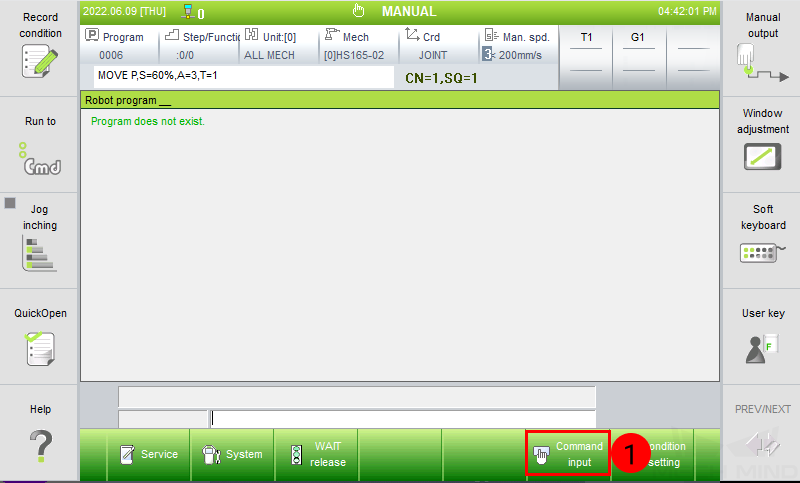
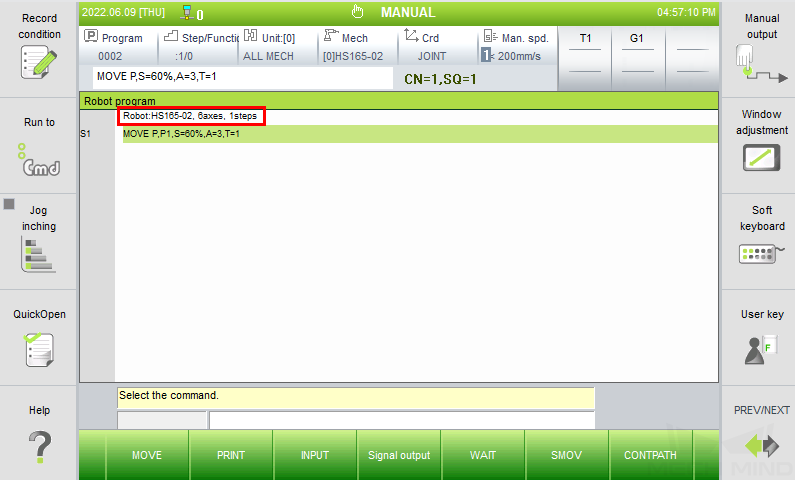
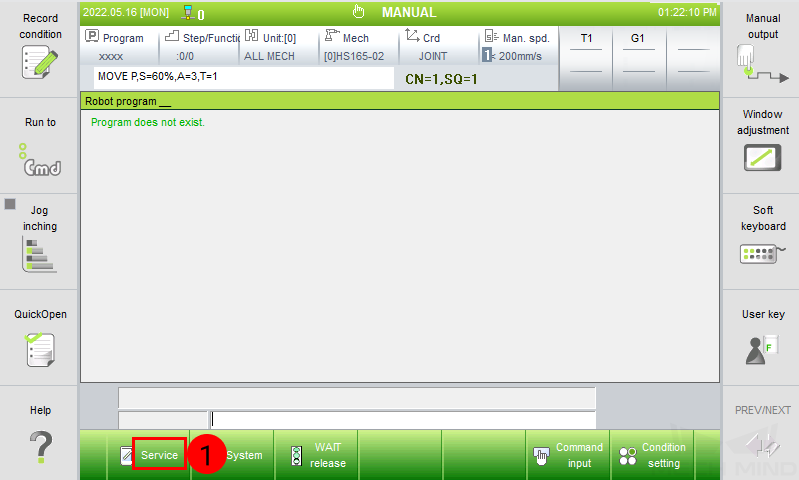
Command input 버튼을 클릭하십시오.
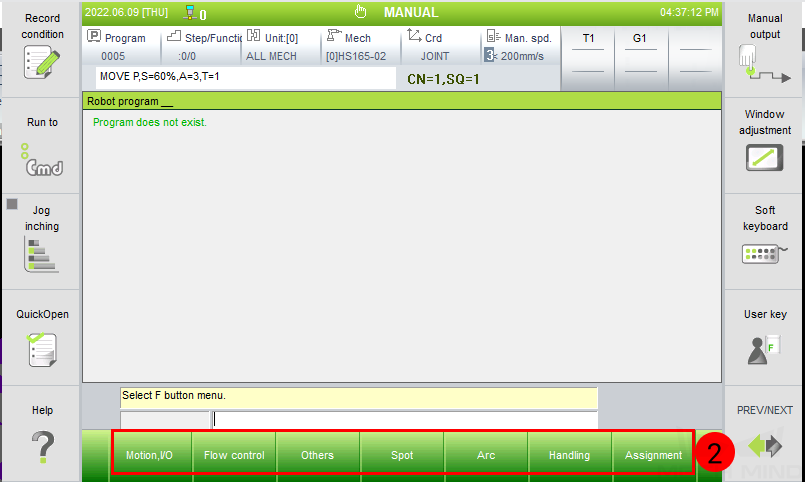
아래 그림과 같이 입력할 명령 중 하나를 선택합니다.
지금 로봇 버전 정보를 볼 수 있습니다. 다음으로 프로그램을 저장하십시오.
새로 생성된 프로그램 파일(또는 기존의 프로그램 파일)을 선택하고 Copy 버튼을 클릭합니다. 다음으로 USB 폴더로 전환하고 Paste 버튼을 클릭하십시오. 복제 과정이 끝난 뒤 USB를 뽑으십시오.
IPC에 USB를 삽입하고 새 프로젝트에서 0101.JOB, 0102.JOB을 제외한 임의의 파일을 열고 첫 번째 줄을 복사합니다.
Mech-Center 파일에서 해당 경로에 저장된 Hyundai 로봇 프로그래밍 파일 0101.JOB 및 0102.JOB 을 열어 복사한 코드를 붙여넣어 프로그램의 첫 번째 줄 내용을 바꾼 다음 변경 사항을 저장하십시오.

파일 경로:
XXXX/Mech-Center-xxx/Robot_Server/Robot_FullControl/hyundai/Hi5a-S.
0101.JOB 및 0102.JOB 파일을 USB로 복사하고 USB를 티치펜더트에 삽입합니다. 다음으로 를 클릭하여 0101.JOB 및 0102.JOB 파일을 선택하고 Copy 버튼을 클릭한 다음에 T/P 폴더를 선택하고 Paste 버튼을 클릭하면 파일을 로봇에 복제할 수 있습니다.
추가 설정¶
IPC의 IP 주소를 192.168.0.150(기본값)으로 변경합니다.
힌트
이 IP주소는 0101.JOB 및 0102.JOB 파일과 관련되어 있으므로 IP주소를 수정하려면 101, 102 프로그램 내용도 함께 수정해야 합니다.
로봇 IP는 IPC와 동일한 서브넷에 있어야 합니다.
라우터의 관리 IP 주소를 192.168.0.1로 설정합니다.
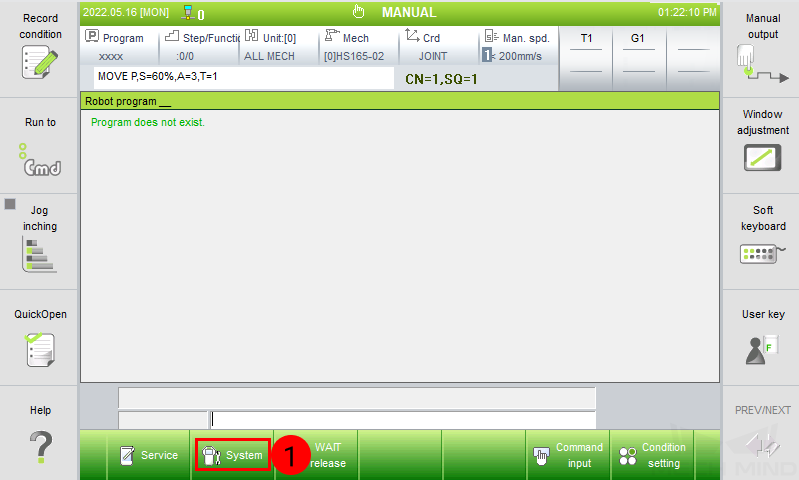
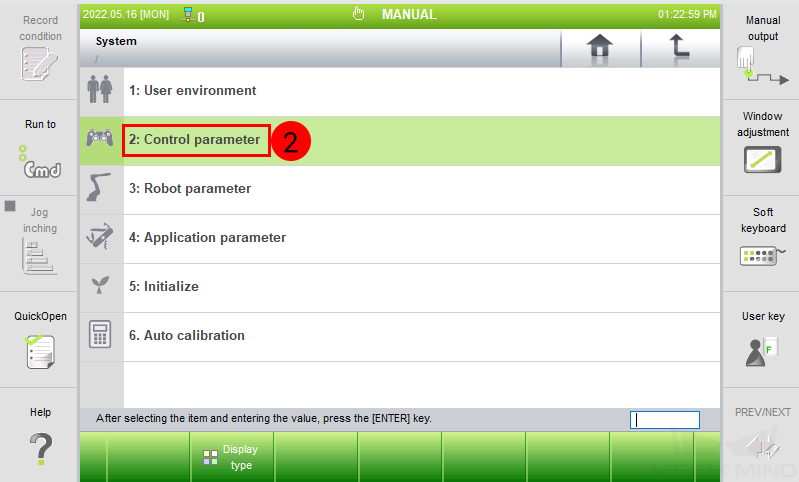
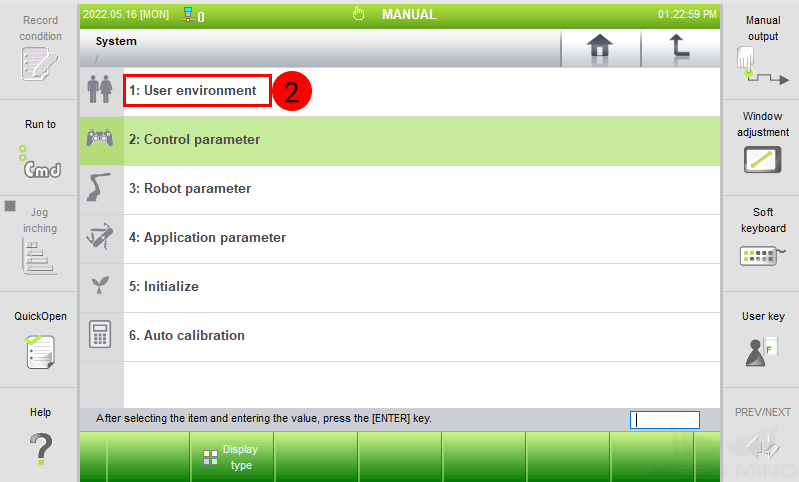
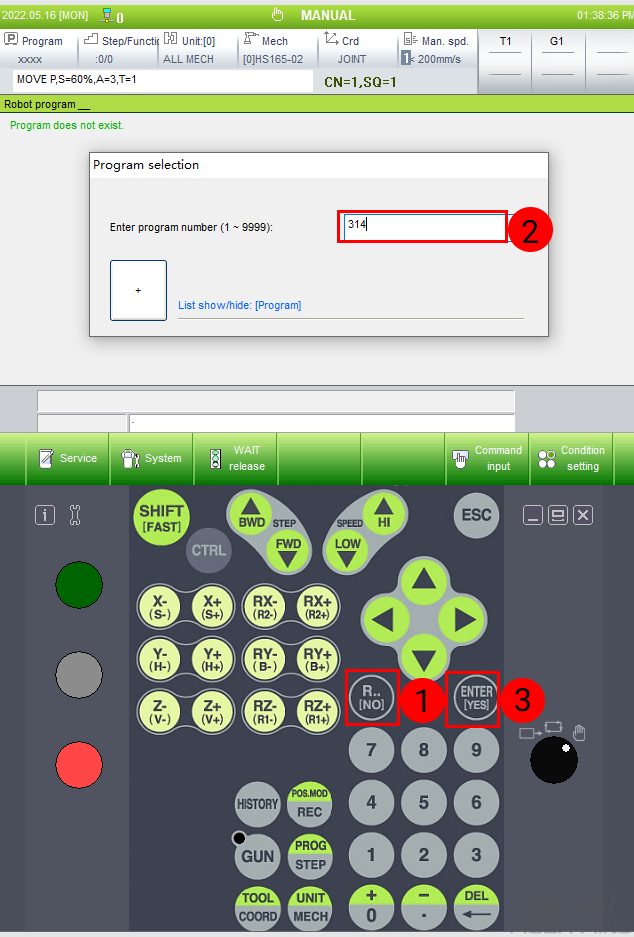
을 클릭하여 사용자 환경 화면으로 들어갑니다.
User key 버튼을 클릭하고 314 (권한을 요청하는 일반 비밀번호)를 입력하여 권한을 획득할 수 있습니다.
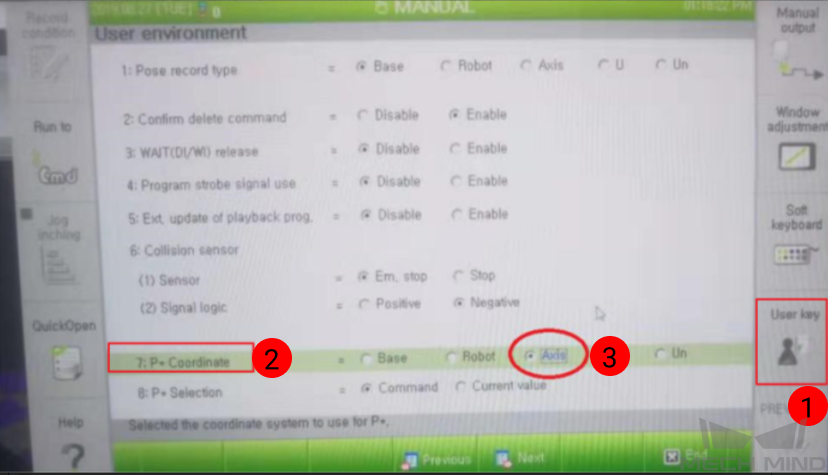
Axis 버튼을 클릭하여 P* Coordinate 관절 정보를 수정합니다.
스크린에서 직접 Axis 을 선택하십시오.
티치펜더트의 SHIFT 버튼을 누른 동시에 왼쪽/오른쪽 키를 눌러 왼쪽 또는 오른쪽으로 이동합니다.

힌트
관절 정보를 수정하지 않았다면 아래와 같은 오류 메시지가 나올 것입니다.

로봇 연결 상태 테스트¶
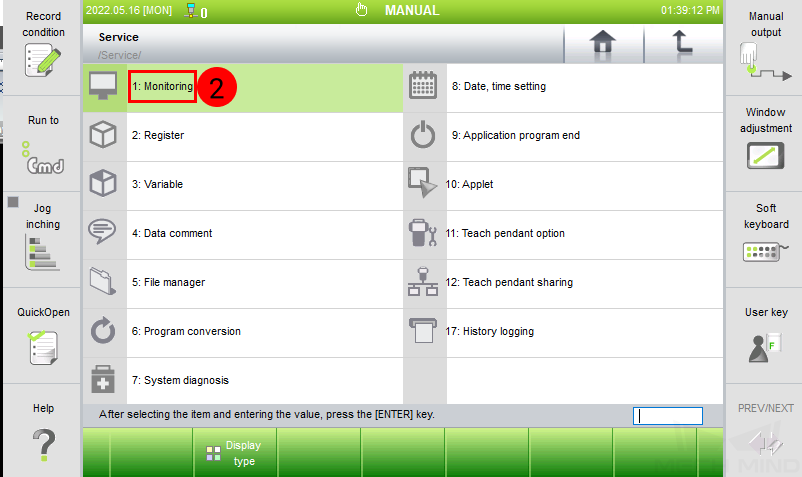
Mech-Center 설정 체크¶
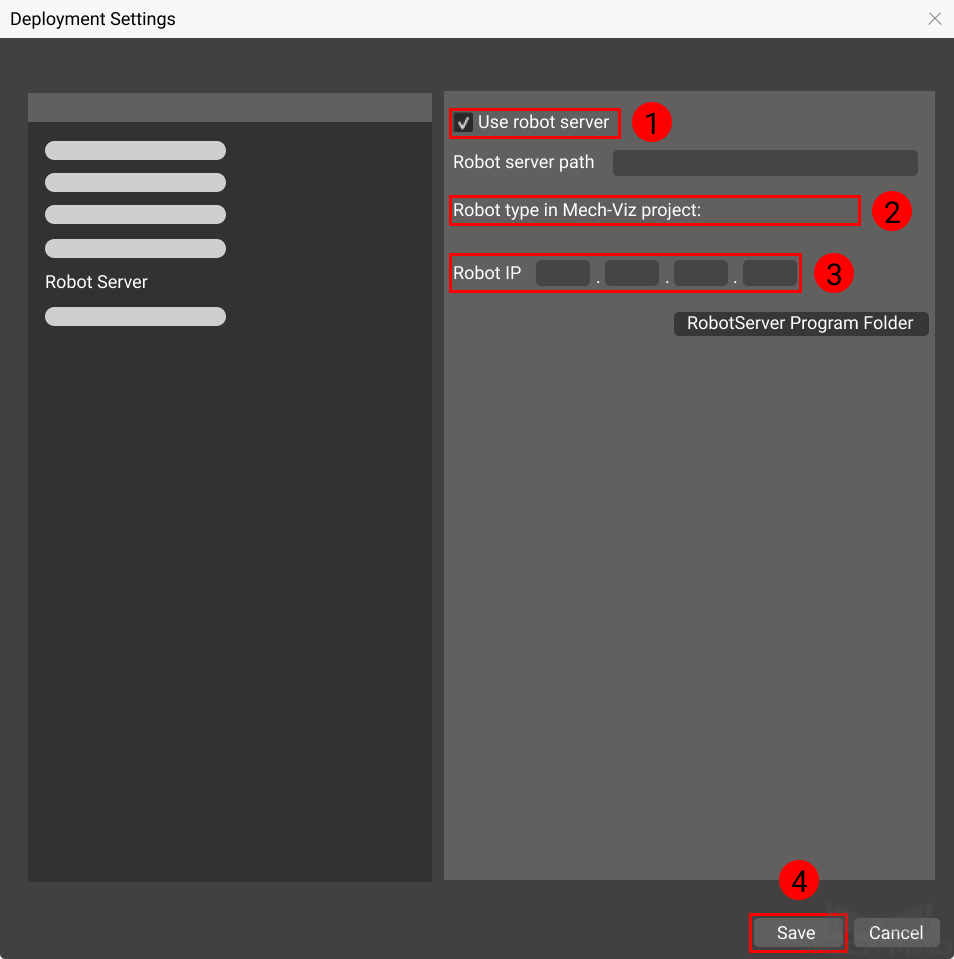
Mech-Center를 실행하여 구성 설정
 버튼을 클릭하십시오.
버튼을 클릭하십시오.Robot Server 패널에서 로봇 모델이 실제 로봇의 모델과 일치한지 확인하십시오.
로봇의 IP 주소를 IPC의 IP 주소로 설정하고 저장 버튼을 클릭하십시오.
로봇 연결¶
툴바에 있는 로봇 컨트롤
 버튼을 클릭하십시오.
버튼을 클릭하십시오.
로봇을 자동 모드로 전환하십시오.
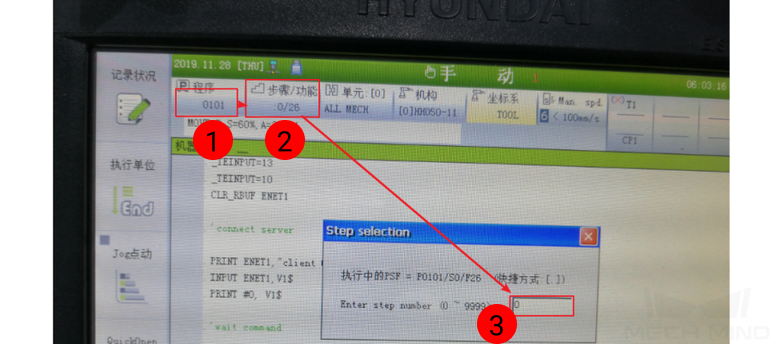
0101.JOB을 열고 버튼을 클릭하고 팝업창에서 0 을 입력하십시오. 0102.JOB을 재설정하는 방법도 마찬가지입니다.
힌트
101 프로그램을 실행하십시오.
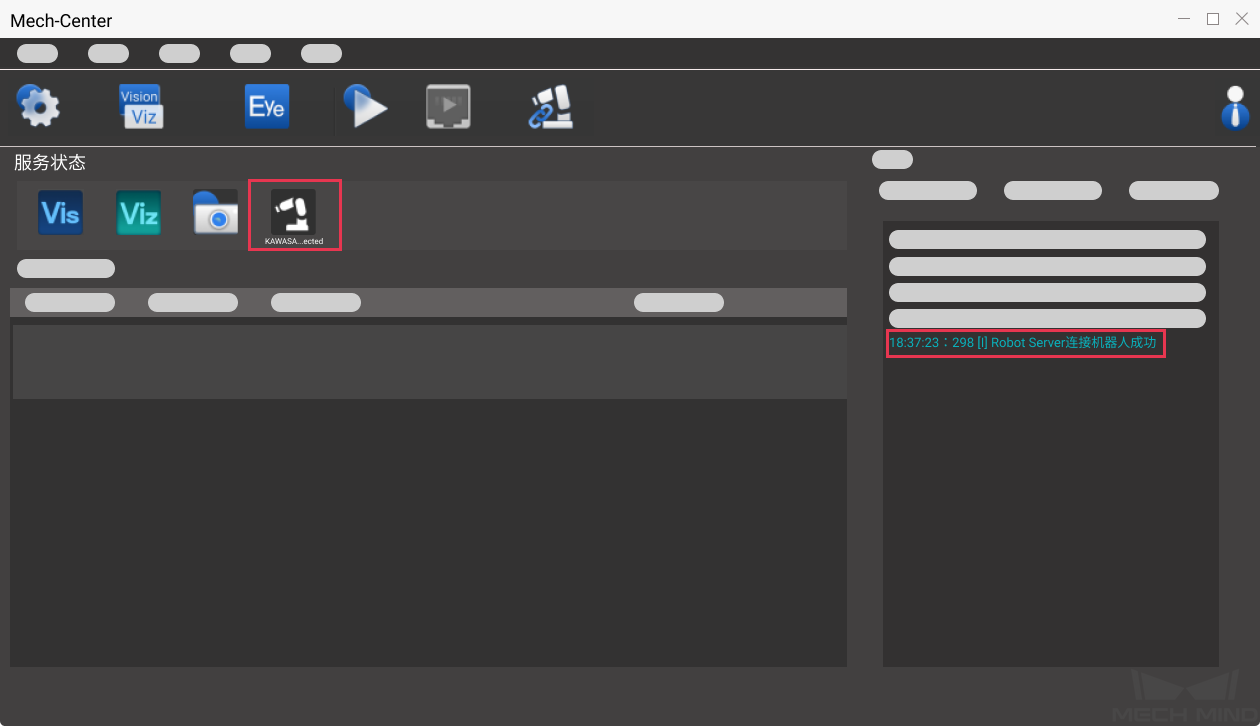
연결이 성공되면 서비스 상태 표시줄에서 로봇의 아이콘과 모델이 표시되며 로그 표시줄에서 로봇이 성공적으로 연결되었다는 정보가 나타납니다.
로봇 재연결¶
티칭 모드에서 버튼을 클릭하여 권한을 요청합니다.
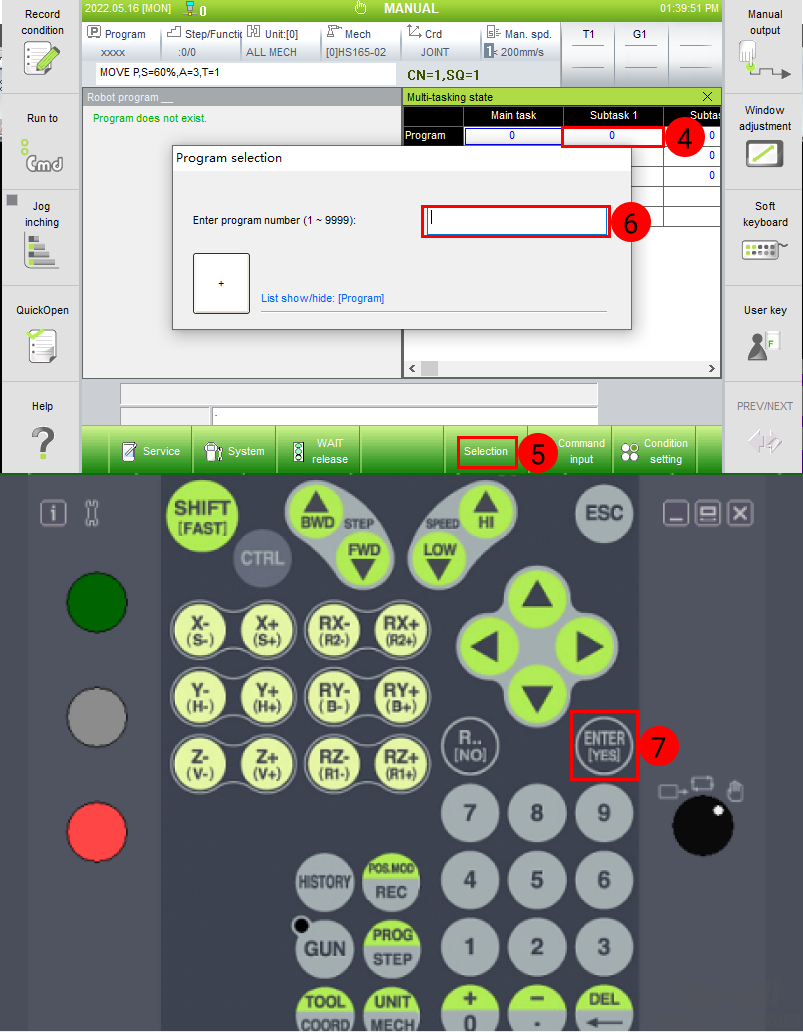
로봇을 다시 연결할 때마다 백그라운드 작업이 중지되고 전경 프로그램의 pstep이 0으로 재설정되어야 합니다. 클릭하여 멀티태스킹 인터페이스로 들어갑니다.
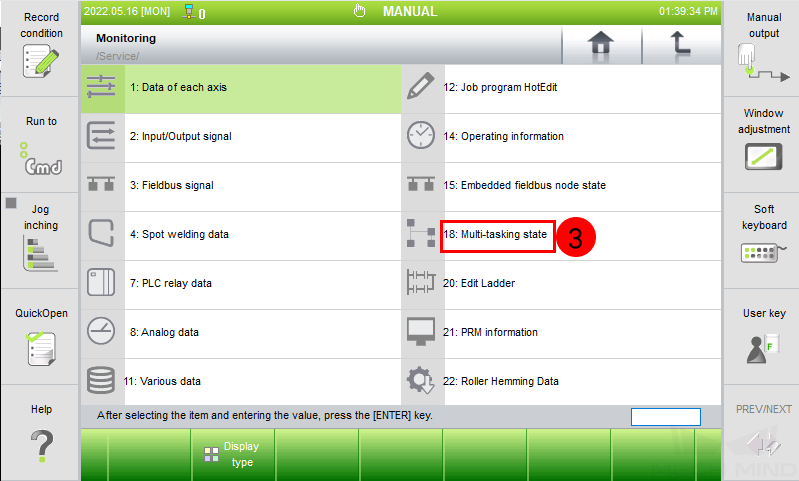
Program (Subtask)를 클릭하고 Selection 버튼을 클릭한 다음에 Program Selection 에 3을 입력하여 ENTER [YES] 버튼을 클릭하면 설정이 완료됩니다.