UR (유니버설 로봇)¶
Mech Viz로 UR 로봇을 컨트롤하는 방법은 다음 5개 단계가 포함됩니다.
UR 로봇은 유니버설 로봇 스크립트를 실행하여 로봇 동작을 제어하므로 IPC는 유니버설 로봇 스크립트를 로봇에 전송하여 로봇을 제어할 수 있습니다.
주의
로봇은 스크립트를 수신할 때마다 즉시 스크립트를 실행합니다. 프로그램이 완료되지 않은 상태에서 모션이 포함된 다른 스크립트가 수신되면 로봇은 급정지한 후 최신 스크립트를 즉시 실행합니다. 포트 30002를 통해 모션이 포함되지 않은 sec(def로 정의되지 않음)로 정의된 스크립트 함수(변수 값 변경 등)를 전송하면 로봇이 갑자기 멈추지 않습니다.
UR5E와 같은 E 시리즈가 있는 로봇의 경우 로봇을 원격 제어로 변경해야만 Mech-Viz로 로봇을 제어할 수 있습니다. 그렇지 않으면 로봇을 동기화할 수만 있고 로봇을 움직일 수 없습니다.
네트워크 연결 설정¶
전원을 켜고 네트워크 케이블을 로봇 제어 캐비닛의 네트워크 포트에 연결합니다.
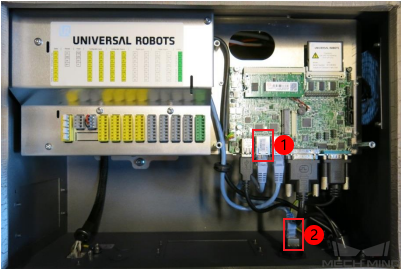
①은 제어 캐비닛의 네트워크 포트이고 ②는 UR 기본 네트워크 포트입니다.
팁
네트워크 케이블의 암/수 커넥터 연장으로 인한 네트워크 불안정을 방지하기 위해 ① 네트워크 포트를 직접 사용하는 것을 권장합니다.
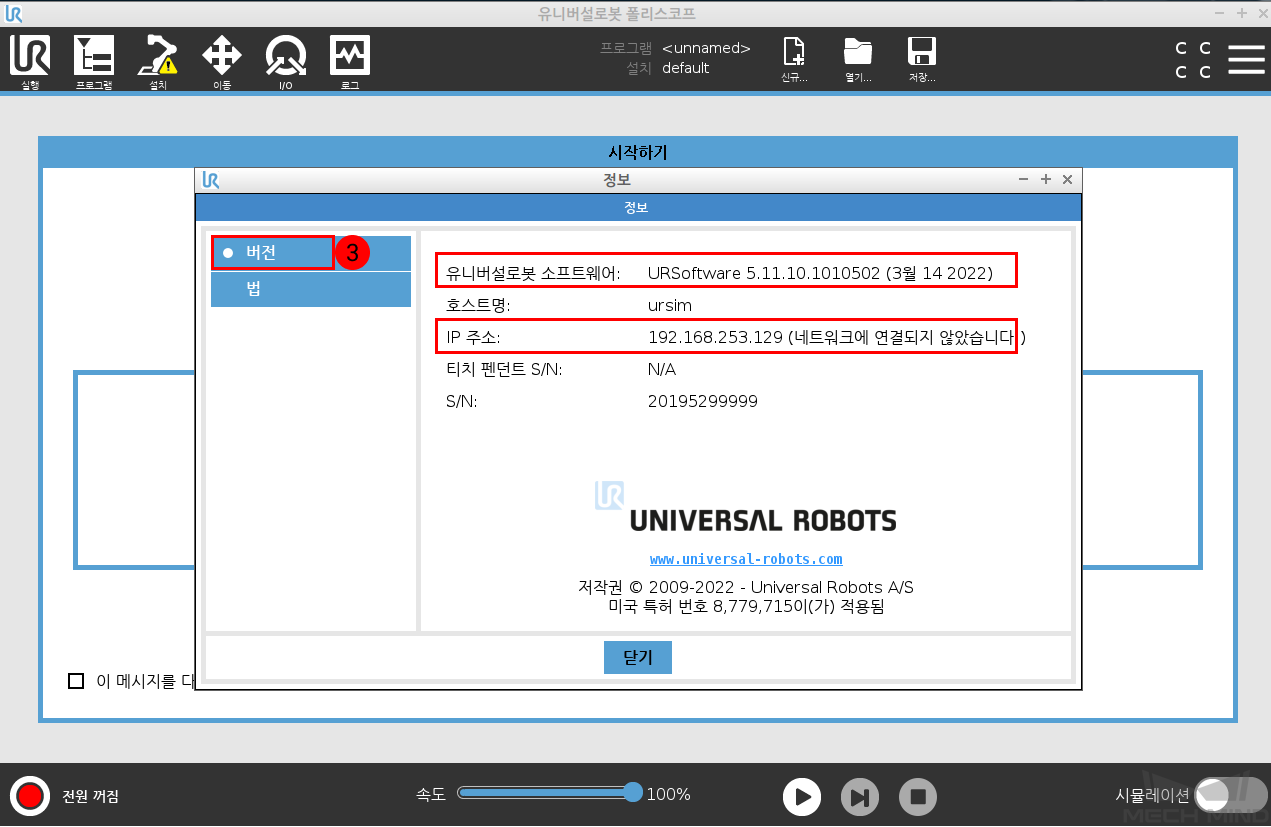
IP 및 컨트롤러 버전 확인¶
티치펜더트의 오른쪽 상단 모서리에 있는 아이콘을 클릭합니다.

정보 를 선택하기.

버전 을 클릭하기.
IP 설정¶
티치펜더트의 오른쪽 상단 모서리에 있는 아이콘을 클릭합니다.
설정 을 선택하기.

버튼을 순서대로 클릭하기.

IPC의 IP와 동일한 네트워크 세그먼트에 있도록 IP 주소를 올바르게 설정하고 설정 완료 후 :guilabel:`Apply`를 클릭합니다.
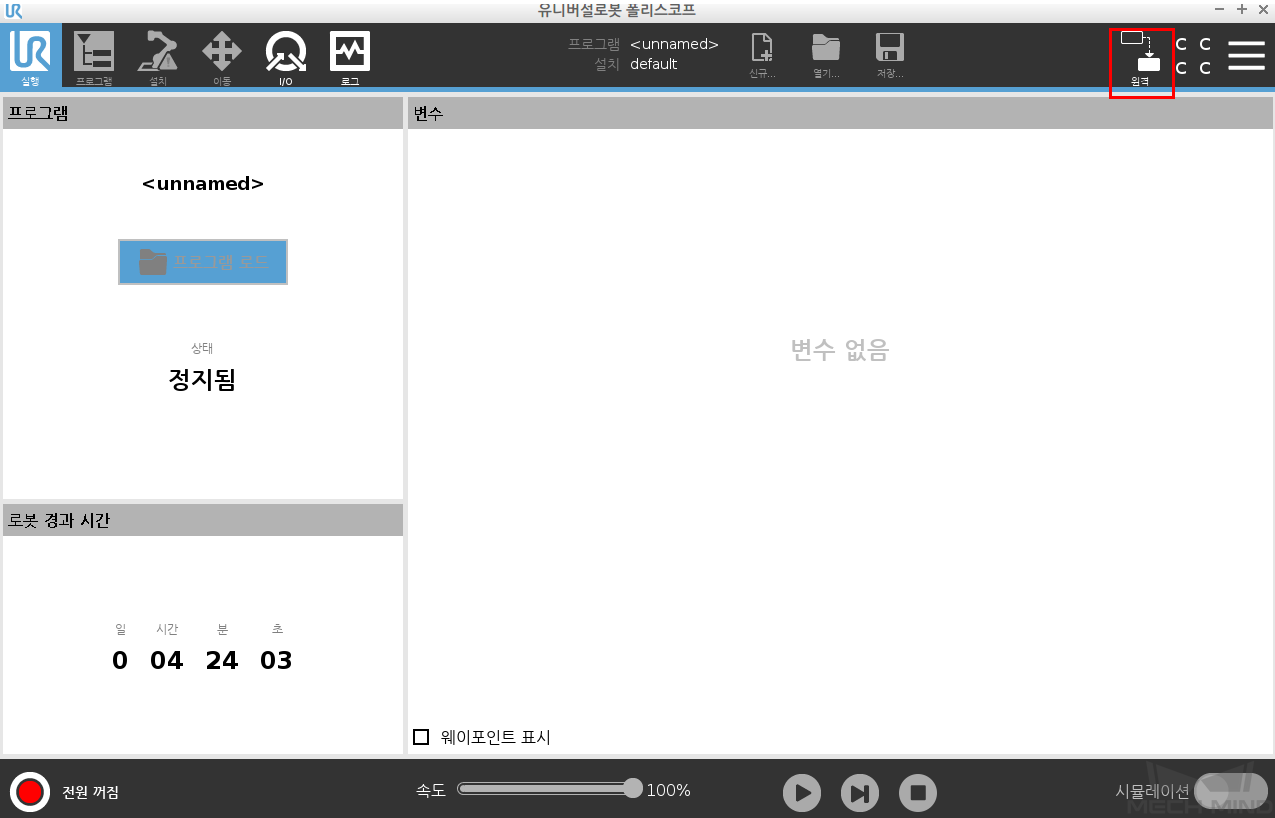
원격 제어 활성화¶
티치펜더트의 오른쪽 상단 모서리에 있는 아이콘을 클릭합니다.
설정 을 선택하기.
버튼을 순서대로 클릭하기.

티치펜더트 우측 상단의 로컬 아이콘을 클릭하면 원격 제어 옵션이 나타납니다.

원격 제어 옵션을 클릭하여 원격 제어 모드로 전환합니다.
Mech-Center 설정 확인 및 로봇 연결¶
로봇 연결 상태 테스트 내용을 참조하십시오.