로봇 연결 상태 테스트¶
Mech-Viz에서 로봇을 구성하기¶
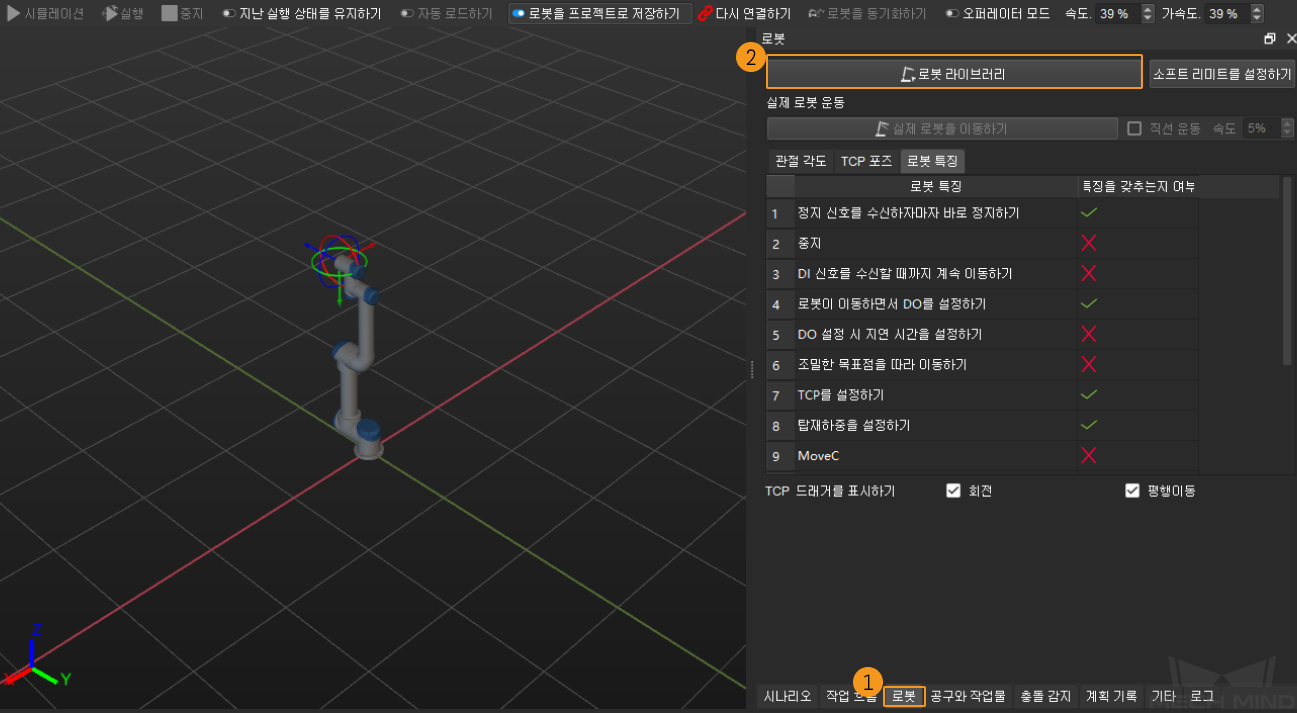
Mech-Viz 소프트웨어를 열어 로봇 버튼을 클릭하고 로봇 라이브러리 에서 실제 로봇과 대응하는 가상 로봇을 선택하십시오.
팁
구체적인 작업은 로봇을 구성하기 내용을 참조하십시오.
키보드에 있는 Ctrl + S 버튼을 눌러 프로젝트를 저장하는 데 사용되는 폴더를 새로 만들거나 선택하십시오.
툴바에 있는 프로젝트를 자동으로 로드하기 옵션을 클릭하고 속도와 가속도를 5%로 조절하십시오.

Mech-Center 설정 사항을 체크하기¶
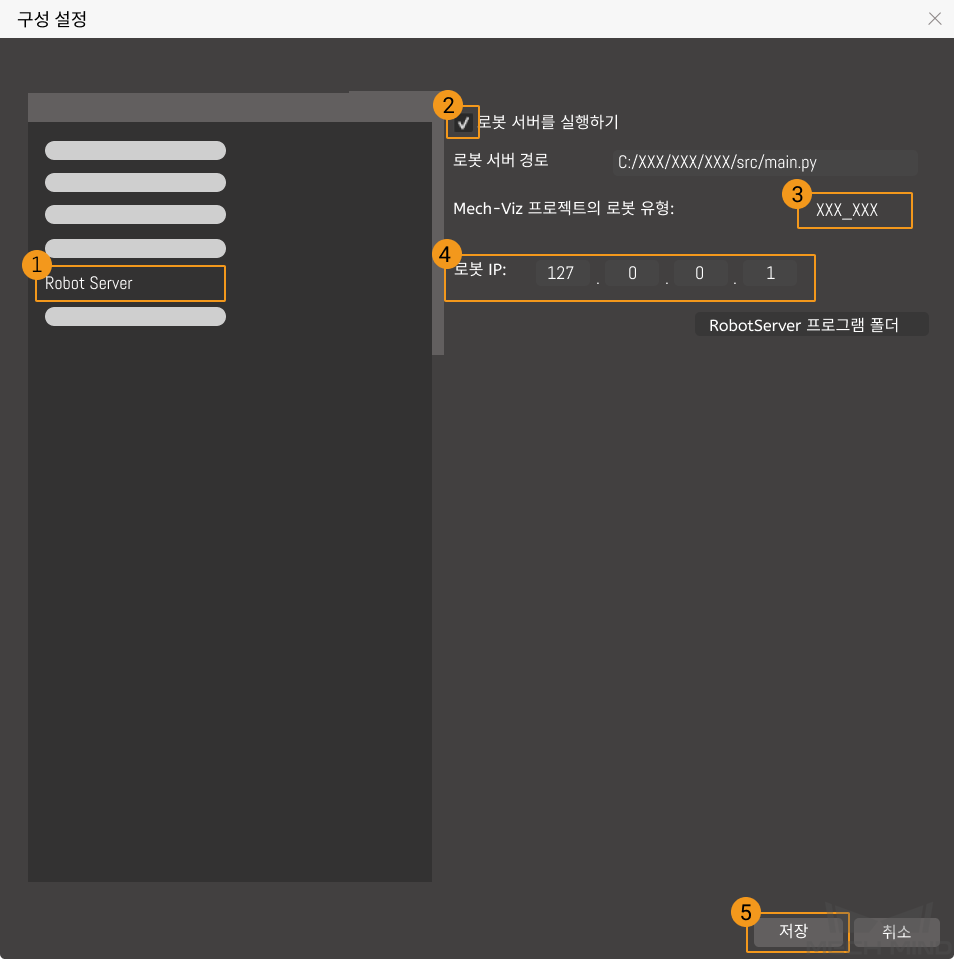
Mech-Center 구성 설정을 열어 Robot Server 화면에서 로봇 서버를 실행하기 버튼을 선택하고 로봇 모델이 실제 로봇 모델과 일치하는지를 확인하십시오. 다음으로 로봇의 실제 IP 주소를 설정하고 저장 버튼을 클릭하십시오.
로봇을 연결하기¶
Mech-Center 툴바에 있는 로봇 컨트롤
 를 클릭하십시오.
를 클릭하십시오.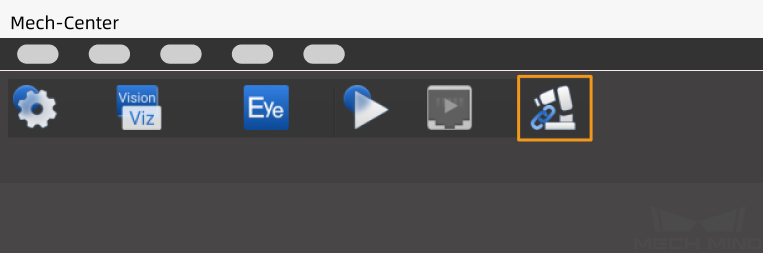
로봇이 연결되면 서비스 상태 표시줄에서 해당 로봇의 아이콘과 모델이 표시되며 로그 표시줄에서 로봇이 성공적으로 연결된다는 메시지가 출력됩니다. 연결되지 못하면 이전 단계의 작업이 올바른지를 확인해야 합니다.

로봇을 이동하기¶
Mech-Viz 툴바에서 로봇을 동기화하기 버튼을 클릭하여 가상 로봇의 포즈를 실제 로봇의 포즈로 동기화하고 로봇을 동기화하기 버튼을 다시 클릭하고 언체크하십시오.

관절 각도 옵션 아래에서 J1 관절 각도를 조금 조절하면(예: 0°를 3°로 조절함) 가상 로봇은 움직일 것입니다.

실제 로봇을 이동하기 버튼을 클릭하면 실제 로봇은 가상 로봇의 포즈로 이동하는 과정을 볼 수 있습니다.

주의
로봇을 작동할 때 부디 안전을 확보하십시오. 비상시 티치펜던트의 비상정지 버튼을 눌러주십시오!