포즈 전환¶
응용 시나리오¶
보통 포즈가 카메라 기준 좌표계 및 로봇 기준 좌표계 간의 상호 전환에 사용됩니다.
입력 및 출력¶
파라미터 설명¶
파라미터 |
파라미터 설명 |
||
시각화 설정 |
선택한 좌표계 아래의 포인트 클라우드를 표시하기 |
로봇 좌표계 |
로봇 좌표계에서 포인트 클라우드를 표시합니다(기본값). |
카메라 좌표계 |
카메라 좌표계에서 포인트 클라우드를 표시합니다. |
||
포즈 표시 설정 |
출력된 포즈만 표시하기 |
처리한 후의 포즈를 표시하기(기본값) |
|
입력한 포즈만 표시하기 |
처리하기 전의 포즈를 표시하기 |
||
입력 및 출력을 함께 표시하기 |
처리 전/후의 포즈를 모두 표시하기 |
||
변환 설정 |
변환 유형 |
CameraToRobot |
포즈를 카메라 좌표계에서 로봇 좌표계로 변환합니다. |
RobotToCamera |
포즈를 로봇 좌표계에서 카메라 좌표계로 변환합니다. |
||
AllWithFirst |
첫 번째 기준 포즈를 사용해서 모든 원시 포즈를 변환합니다. |
||
FirstWithAll |
모든 기준 포즈를 사용해서 첫 번째 원시 포즈를 변환합니다. |
||
UseCorrespondenceInput |
기준 포즈를 사용해서 1대1로 원시 포즈를 변환합니다. |
||
응용 예시¶
파라미터 조절 설명¶
시각화 설정
- 선택한 좌표계 아래의 포인트 클라우드를 표시하기
- 기본값: 로봇 좌표계값 리스트: 로봇 좌표계, 카메라 좌표계설명: 카메라 좌표계 를 선택할 때 아래 왼쪽 그림과 같이 디버그 출력 창에서 카메라 좌표계에서의 시각화 출력 결과를 표시합니다. 로봇 좌표계 를 선택할 때 아래 오른쪽 그림과 같이 디버그 출력 창에서 로봇 좌표계에서의 시각화 출력 결과를 표시합니다.
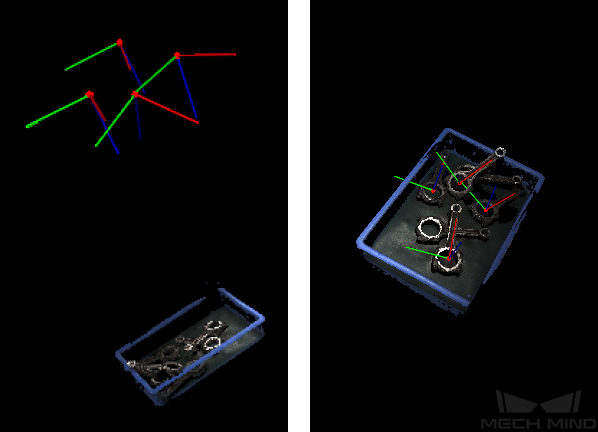
팁
로봇 좌표계 를 선택하는 경우 디버그 출력 창은 검은색이고 시각을 조절해야 포인트 클라우드 및 좌표를 볼 수 있습니다.
카메라 좌표계 를 선택하는 경우 디버그 출력 창에는 포인트 클라우드만 표시하고 포인트 클라우드 방향을 조절해야 좌표를 볼 수 있습니다.
- 포즈 표시 설정
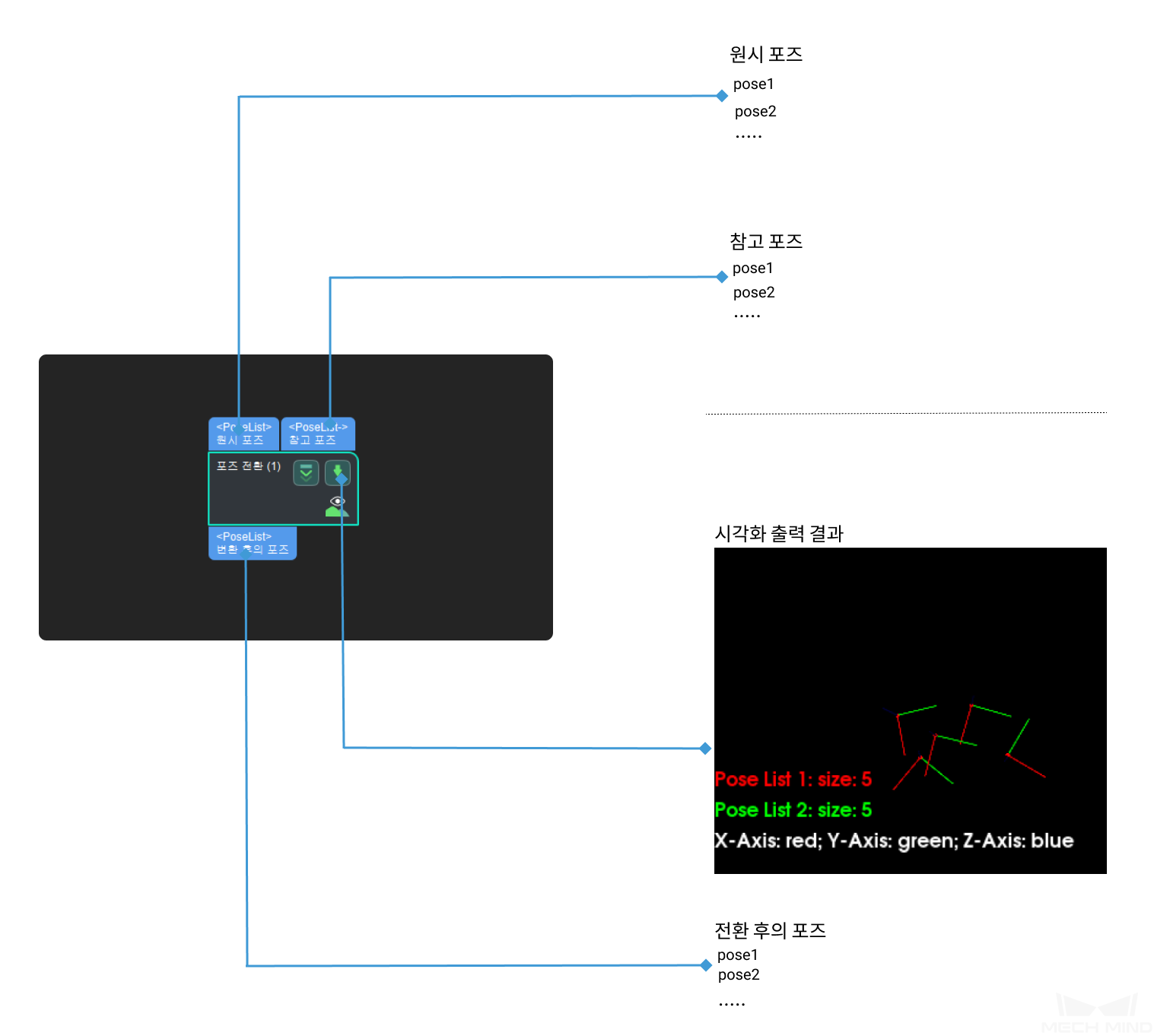
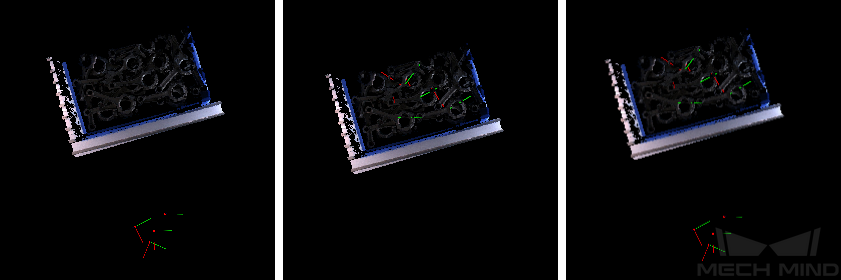
- 기본값: 출력된 포즈만 표시하기값 리스트:출력된 포즈만 표시하기,입력한 포즈만 표시하기 ,입력 및 출력을 함께 표시하기설명: 카메라 좌표계를 예시로 설명하자면 출력된 포즈만 표시하기 , 입력한 포즈만 표시하기 , 입력 및 출력을 함께 표시하기 를 선택할 때 각각의 포즈 표시 효과는 아래 그림과 같습니다.
변환 설정
- 변환 유형
- 기본값: CameraToRobot값 리스트: CameraToRobot、RobotToCamera、AllWithFirst、FirstWithAll、UseCorrespondenceInput설명:
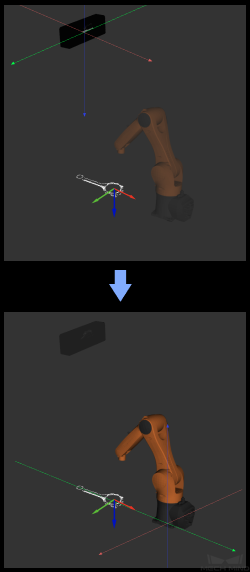
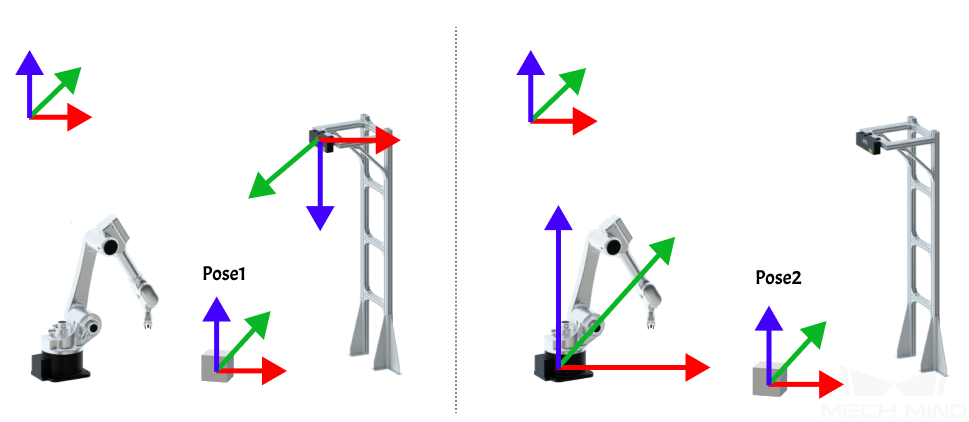
CameraToRobot:물체가 카메라 좌표계에 있는 포즈 Pose1이 알려진 경우 변환 유형은 CameraToRobot 을 선택할 때 물체가 로봇 좌표계에 있는 포즈 Pose2를 출력할 수 있습니다. 포즈 변환 전(왼쪽)/후(오른쪽)의 효과는 아래 그림과 같습니다.
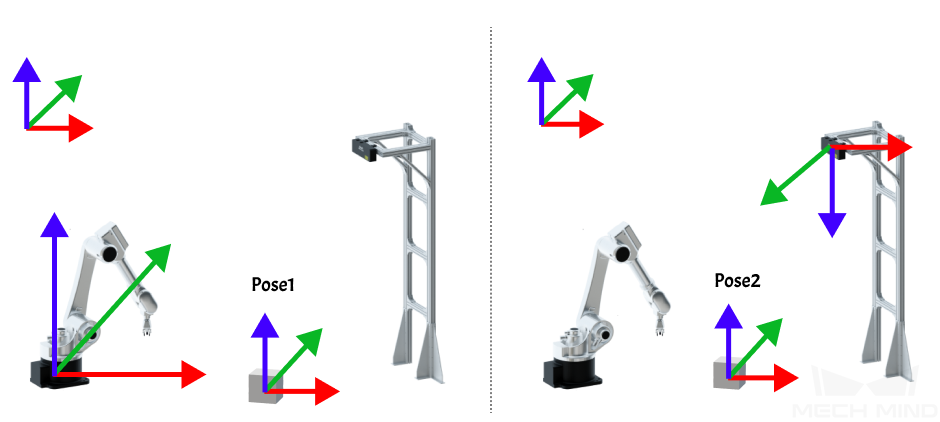
RobotToCamera:물체가 로봇 좌표계에 있는 포즈 Pose1이 알려진 경우 변환 유형은 RobotToCamera 를 선택할 때 물체가 카메라 좌표계에 있는 포즈 Pose2를 출력할 수 있습니다. 포즈 변환 전(왼쪽)/후(오른쪽)의 효과는 아래 그림과 같습니다.
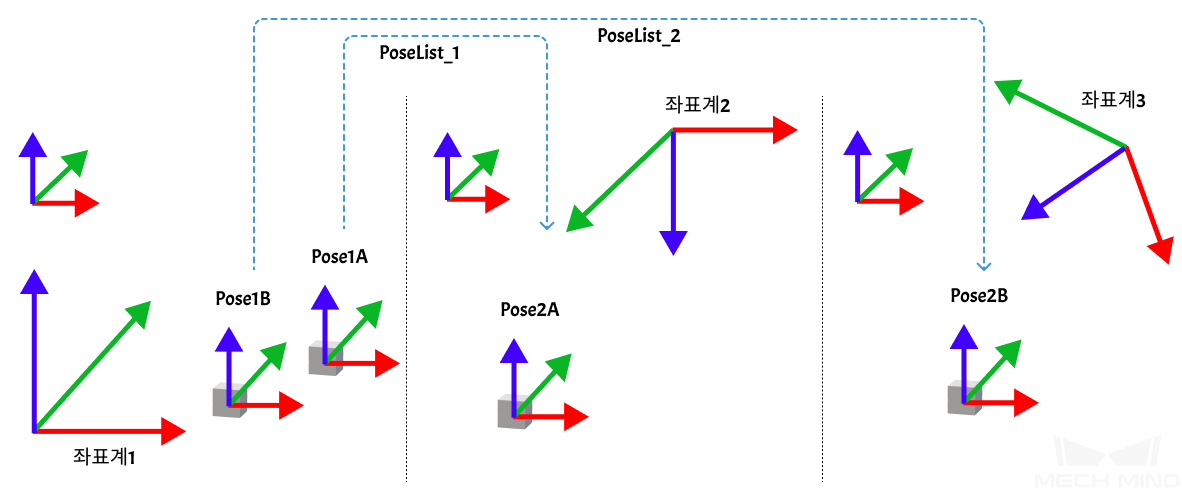
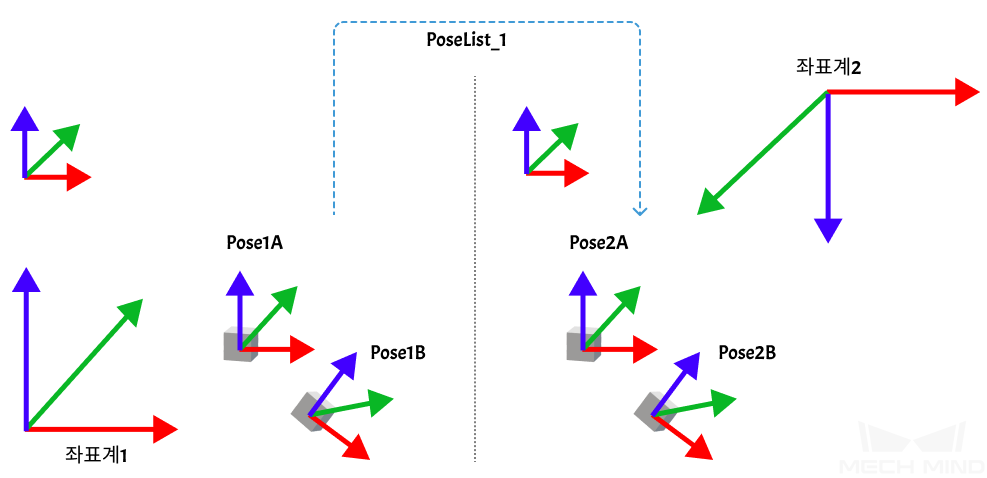
AllWithFirst:물체 A, B가 좌표계1에 있는 포즈 Pose1A, Pose1B가 알려진 경우 변환 유형은 AllWithFirst 를 선택할 때(기준 포즈를 입력해야 함) 물체 A, B가 좌표계2에 있는 포즈 Pose2A, Pose2B를 출력할 수 있습니다. 변환하는 동안 첫 번째 기준 포즈를 사용하여 모든 원시 포즈를 변환해야 합니다. 포즈 변환 전(왼쪽)/후(오른쪽)의 효과는 아래 그림과 같습니다.
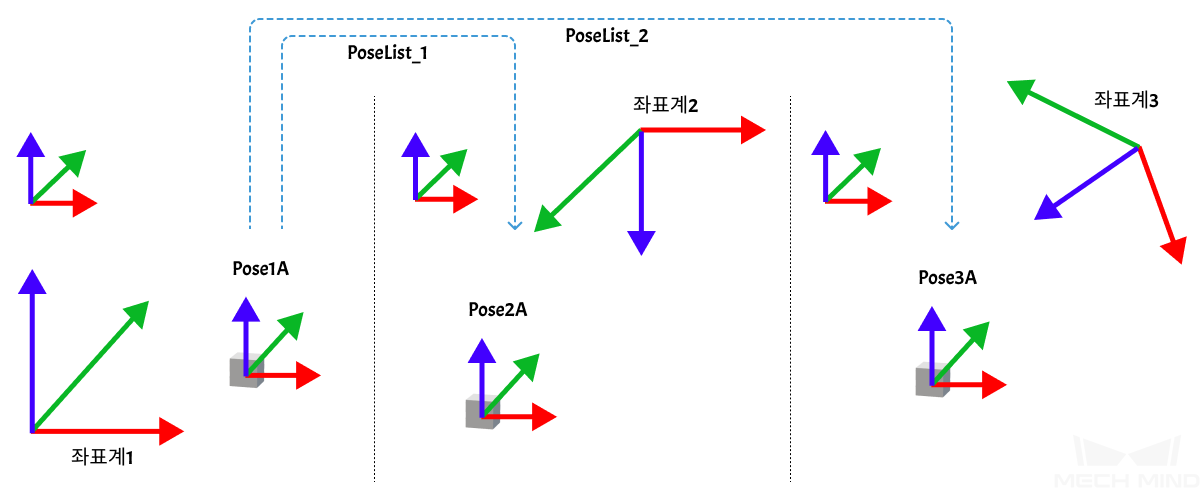
FirstWithAll:물체 A, B가 좌표계1에 있는 포즈 Pose1A, Pose1B가 알려진 경우 변환 유형은 FirstWithAll 를 선택할 때(기준 포즈를 입력해야 함) 물체 A가 좌표계2 및 좌표계3에 있는 포즈 Pose2A, Pose3A를 출력할 수 있습니다. 변환하는 동안 모든 기준 포즈를 사용하여 첫 번째 원시 포즈를 변환해야 합니다. 포즈 변환의 효과는 아래 그림과 같습니다.
UseCorrespondenceInput:물체 A, B가 좌표계1에 있는 포즈 Pose1A, Pose1B가 알려진 경우 변환 유형은 UseCorrespondenceInput 를 선택할 때(기준 포즈를 입력해야 함) 물체 A가 좌표계2에 있는 포즈 Pose2A와 물체B가 좌표계3에 있는 포즈 Pose3B를 출력할 수 있습니다. 변환하는 동안 기준 포즈를 사용해서 1대1로 원시 포즈를 변환해야 합니다. 포즈 변환의 효과는 아래 그림과 같습니다.