많은 픽 포인트에 매핑하기¶
기능 설명
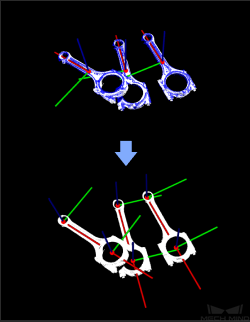
물체의 기하학적 중심점과 설정된 매핑 관계를 통해 다른 픽 포인트를 계산합니다.
응용 시나리오
픽 포인트와 기하학적 중심점이 다르거나 픽 포인트가 여러 개 있을 때 이 스텝을 사용해야 합니다. 다음과 같은 방법을 통해 시나리오에 있는 물체에 로봇 컨트롤 소프트웨어로 보낼 수 있는 픽 포인트를 추가하세요:
이 스텝에서 출력된 “픽 포인트”가 스텝 포즈 전환 의 “참고 포즈” 포트와 연결되어야 합니다.
이 스텝에서 출력된 “포즈 옵셋”이 스텝 포즈 전환 의 “원시 포즈” 포트와 연결되어야 합니다.
입력 및 출력
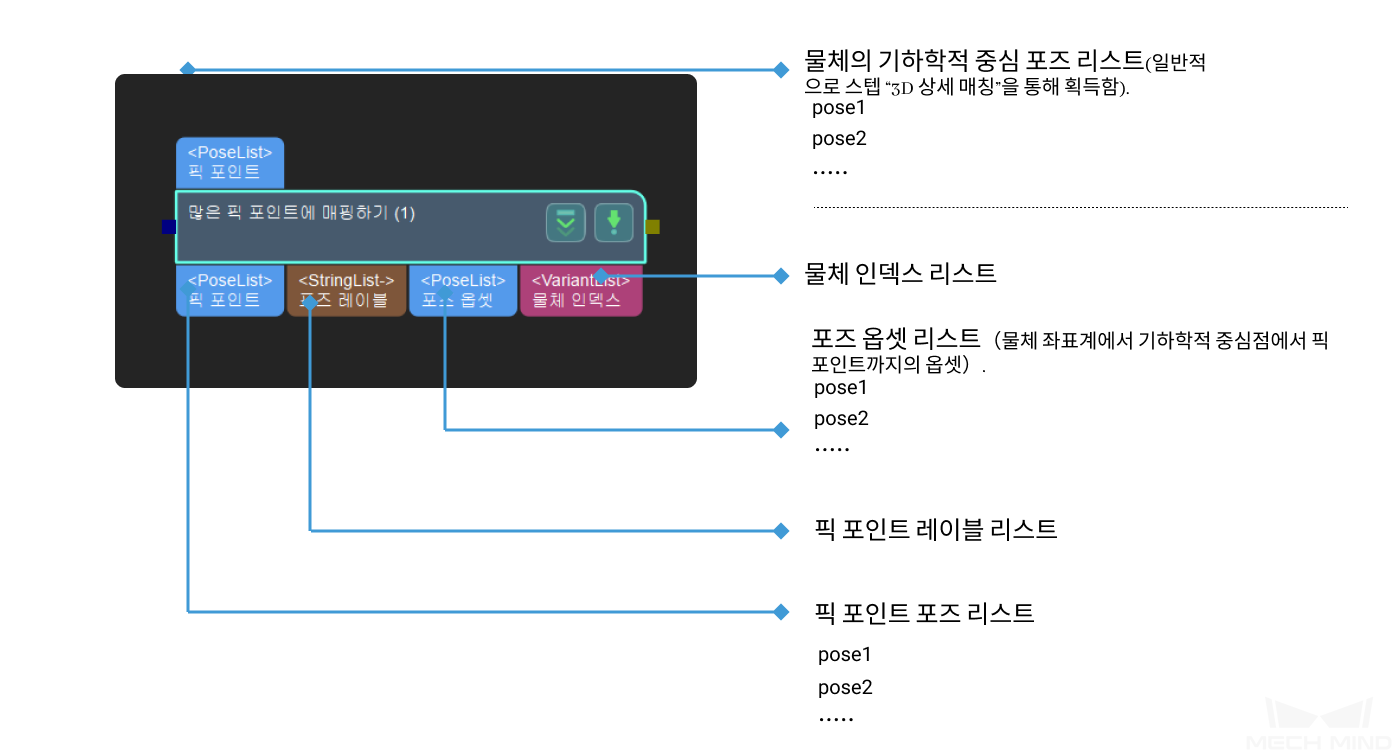
파라미터 설명
기하학적 중심 파일
템플릿에서 물체 기하학적 중심의 포즈설명: 가하학적 중심 파일의 절대 경로나 상대 경로를 저장합니다.배치 포인트 포즈 파일
물체 배치 포인트의 포즈설명: 배치 포인트 파일의 절대 경로나 상대 경로를 저장합니다.픽 포인트 포즈 파일
템플릿에서 물체 픽 포인트의 포즈설명: 픽 포인트 파일의 절대 경로나 상대 경로를 저장합니다.포즈 레이블 파일
픽 포인트 파일과 대응하는 레이블 파일설명: 레이블 파일의 절대 경로나 상대 경로를 저장합니다.