지정한 방향으로 포즈를 이동하기¶
응용 시나리오¶
사용자가 지정한 방향 및 거리대로 포즈를 평행이동합니다.
입력 및 출력¶
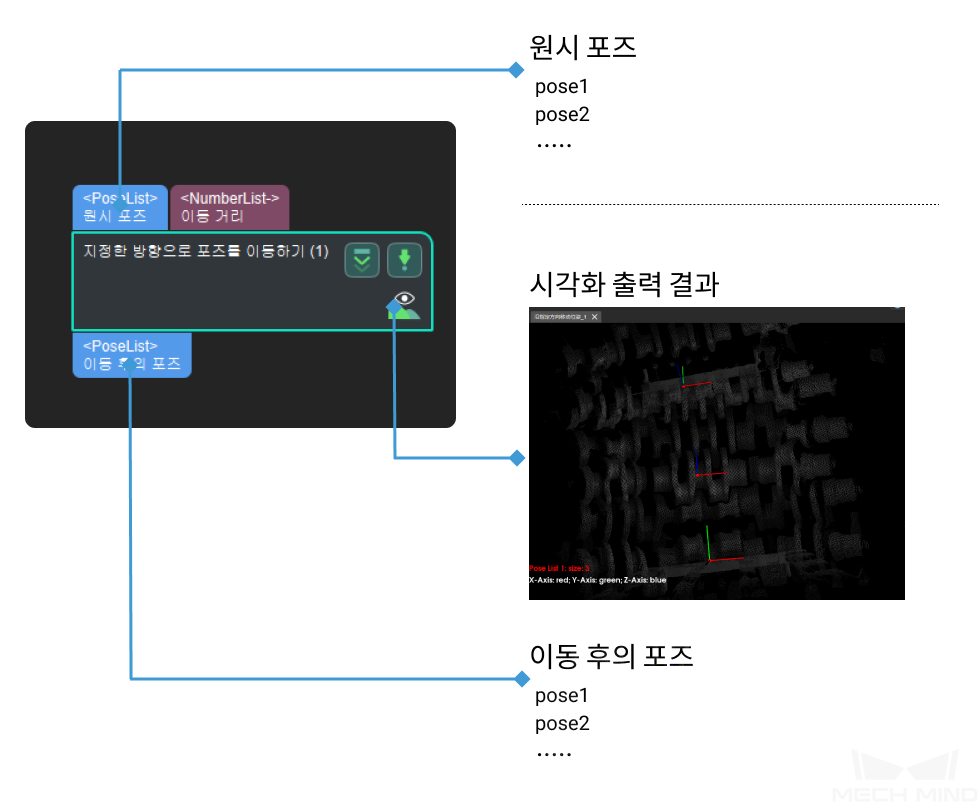
파라미터 설명¶
파라미터 |
파라미터 설명 |
|
시각화 설정 |
선택한 좌표계에서 포인트 클라우드를 표시하기 |
로봇 또는 카메라 좌표계에서 포인트 클라우드를 표시하기 |
포즈 시각화 설정 |
After, Before, All |
|
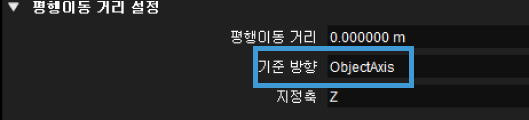
평행이동 거리 설정 |
평행이동 거리 |
자체 정의한 방향에 따른 평행이동 거리입니다. |
기준 방향 |
CustomizedDirection:자체 정의한 방향에 따라 평행이동합니다. ObjectAxis:포즈 특정한 축의 방향에 따라 평행이동합니다. |
|
자체 정의한 방향 |
X |
기준 방향을 구성하는 데 사용되는 X 값입니다. |
Y |
기준 방향을 구성하는 데 사용되는 Y 값입니다. |
|
Z |
기준 방향을 구성하는 데 사용되는 Z 값입니다. |
|
응용 예시¶
파라미터 조절 설명¶
시각화 설정
- 선택한 좌표계에서 포인트 클라우드를 표시하기
- 포즈 시각화 설정
- 기본값: 출력한 포즈만 표시하기값 리스트: 출력한 포즈만 표시하기, 입력한 포즈만 표시하기, 출력한 포즈와 입력한 포즈를 모두 표시하기설명: 선택한 좌표계에서 포인트 클라우드를 표시하기 내용을 참조하십시오.
평행이동 거리 설정
- 평행이동 거리
- 기본값: 0설명: 실제 상황에 따라 설정하십시오.
- 기준 방향
- 기본값: CustomizedDirection(자체 정의한 방향에 따라 평행이동합니다).값 리스트: CustomizedDirection(자체 정의한 방향에 따라 평행이동합니다), ObjectAxis(포즈 특정한 축의 방향에 따라 평행이동합니다).설명: 실제 상황에 따라 선택하십시오.
힌트
기준 방향을 ObjectAxis를 선택할 때 실제 상황에 따라 지정축을 선택할 수 있습니다.
자체 정의한 방향 : 기준 방향을 CustomizedDirection를 선택할 때만 이 옵션을 볼 수 있습니다.
- X
- 기본값: 0
- Y
- 기본값: 0
- Z
- 기본값: 1
조절 예시
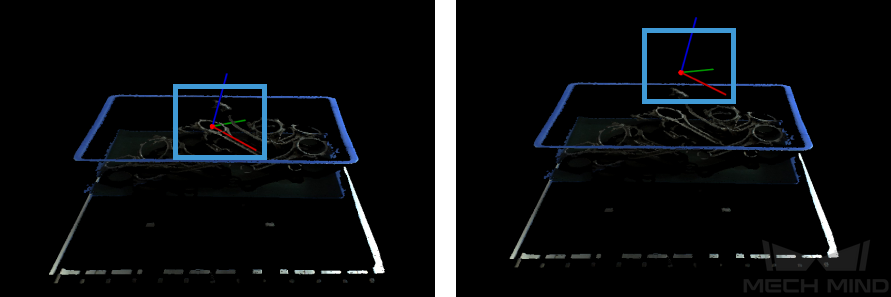
기준 방향은 ObjectAxis, 지정축은 X축, 이동 거리는 각각 0 및 0.03일 때 포즈의 이동 효과는 아래 그림과 같습니다. 그중에 왼쪽 그림은 이동 거리가 0인 경우이고, 오른쪽 그림은 왼쪽 그림에 있는 포즈가 X축 방향에 따라 0.03m 이동한 후의 결과입니다.

기준 방향은 ObjectAxis, 지정축은 Y축, 이동 거리는 각각 0 및 0.03일 때 포즈의 이동 효과는 아래 그림과 같습니다. 그중에 왼쪽 그림은 이동 거리가 0인 경우이고, 오른쪽 그림은 왼쪽 그림에 있는 포즈가 X축 방향에 따라 0.03m 이동한 후의 결과입니다.

기준 방향은 ObjectAxis, 지정축은 Z축, 이동 거리는 각각 0 및 0.08일 때 포즈의 이동 효과는 아래 그림과 같습니다. 그중에 왼쪽 그림은 이동 거리가 0인 경우이고, 오른쪽 그림은 왼쪽 그림에 있는 포즈가 X축 방향에 따라 0.08m 이동한 후의 결과입니다.
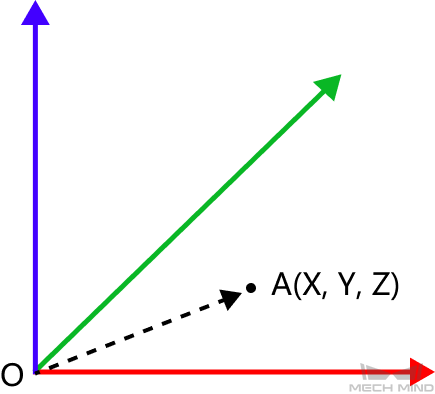
기준 방향은 CustomizedDirection일 때 자체 정의한 방향에서 X, Y, Z의 수치를 각각 설정해야 합니다. 아래 그림과 같이 원점O에서 포인트A(X, Y, Z)까지의 방향은 바로 포즈가 평행이동하는 방향입니다.
X, Y, Z의 값을 모두 5로 설정하고 이동 거리가 0.08m일 때 포즈의 이동 효과는 아래 그림과 같습니다. 그중에 왼쪽 그림은 이동하기 전에 포즈이고 오른쪽 그림은 왼쪽 그림이 자체 정의한 방향에서 위로 0.08m를 이동한 후의 결과입니다.
