포인트 클라우드를 필터링하기¶
기능 설명
설정한 규칙에 따라 포인트 클라우드를 필터링합니다.
응용 시나리오
일반적으로 포인트 클라우드의 포인트 수를 근거로 필터링합니다(파라미터 “필터 유형”의“CloudCapacityFilter”와 대응함). 이 스텝은 구버전이라 필터링 후의 부울 값을 출력하지 못합니다. 새로운 버전의 스텝 포인트 클라우드가 요구에 맞출 수 있는지 확인하기 를 사용하세요.
입력 및 출력
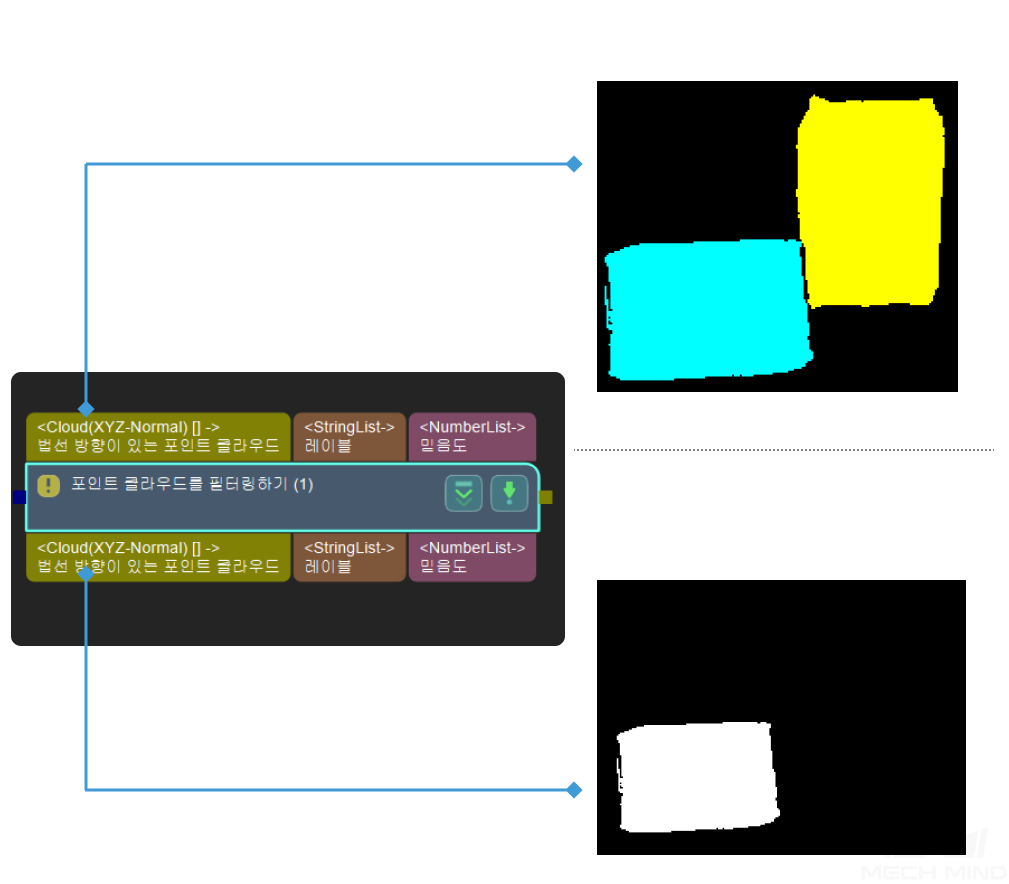
파라미터 설명
필터 유형(_filterType)
설명: 이 파라미터는 필터링 유형을 선택하는 데 사용됩니다.3 가지의 유형을 선택할 수 있습니다: 원형 포인트 클라우드 필터링(CircleCloudsFilter), 포인트 클라우드 용량 필터링(CloudCapacityFilter),사각형 포인트 클라우드 필터링(RecCloudsFilter) 및 솔리드 포인트 클라우드 필터링(SolidCloudsFilter)입니다.기본값: CircleCloudsFilter추천값: 실제 상황에 따라 설정합니다.값 리스트: CircleCloudsFilter, CloudCapacityFilter,RecCloudsFilter,SolidCloudsFilter원형 포인트 클라우드 필터링(CircleCloudsFilter)
원형 포인트 클라우드 필터링:3D 포인트 클라우드를 2D 마스크로 투영하고 마스크의 외부 윤곽을 획득하여 원형성 및 둘레 길이를 계산합니다. 역치 범위 이외의 포인트 클라우드를 제거합니다.
윤곽 검색 모드(contourRetrievalMode)
설명: 이 파라미터는 윤곽 검색 모드를 선택하는 데 사용됩니다. RETR_EXTERNAL 및 RETR_HULL 2 가지 유형이 있습니다.기본값: RECT_EXTERNAL추천값: 실제 감지 수요에 따라 설정합니다.최소 면접(minAreaThreashold)
설명: 원형 포인트 클라우드의 최소 면적.기본값: 100추천값: 실제 상황에 따라 설정합니다.최대 면접(maxAreaThreashold)
설명: 원형 포인트 클라우드의 최대 면적.기본값: 1000추천값: 실제 상황에 따라 설정합니다.최소 진원도(minCircularity)
설명: 원형 포인트 클라우드의 최소 진원도.기본값: 0.5추천값: 실제 상황에 따라 설정합니다.최대 진원도(maxCircularity)
설명: 원형 포인트 클라우드의 최대 진원도.기본값: 1추천값: 실제 상황에 따라 설정합니다.최소 불록한 정도(minConvexity)
설명:원형 포인트 클라우드의 최소 불록한 정도.기본값: 0.8추천값: 실제 상황에 따라 설정합니다.최대 불록한 정도(maxConvexity)
설명:원형 포인트 클라우드의 최대 불록한 정도.기본값: 1추천값: 실제 상황에 따라 설정합니다.최소 관성(minInertia)
설명: 짧은 축과 긴 축간의 최소 비율 역치.기본값: 0.6추천값: 실제 상황에 따라 설정합니다.최소 관성(maxInertia)
설명: 짧은 축과 긴 축간의 최대 비율 역치.기본값: 1추천값: 실제 상황에 따라 설정합니다.포인트 클라우드 용량 필터링(CloudCapacityFilter)
포인트 클라우드 용량 필터링: 포인트 클라우드 리스트에 포인트 수가 역치 범위를 초과한 포인트 클라우드를 제거합니다.
최소 포인트 수(minPointsNum)
설명:최소 포인트 수.기본값: 6000추천값: 실제 상황에 따라 설정합니다.유효 범위: (0,maxPointsNum)최대 포인트 수(maxPointsNum)
설명: 최대 포인트 수.기본값: 360000추천값: 실제 상황에 따라 설정합니다.유효 범위: (minPointsNum,∞)사각형 포인트 클라우드 필터링(RecCloudsFilter)
minRectangularity
설명: 이 파라미터는 최소 직사각도를 조절하는 데 사용됩니다.직사각도는 포인트 클라우드의 실제 면접과 최소 외접 사각형 간의 면접 비뷸입니다.기본값: 0.9000추천값: 실제 상황에 따라 설정합니다.솔리드 포인트 클라우드 필터링(SolidCloudsFilter)
ratio
설명: 이 파라미터는 포인트 클라우드와 메우게 된 실제 물체 사이즈의 최소 비율.기본값: 0.9추천값: 실제 상황에 따라 설정합니다.유효 범위: (0,1]removeSolidCloud
설명:이 파라미터는 솔리드 포인트 클라우드를 제거한지를 결정합니다.True로 설정하면 제거하고 False 로 설정하면 텅빈 포인트 클라우드를 제거합니다.기본값: True추천값: 실제 상황에 따라 설정합니다.값 리스트: True, False팽창 사이즈(dilateSize)
설명: 이 파라미터는 주로 팽창 구조요소의 사이즈를 조절하는 데 사용됩니다. 필터링 유형(filterType)는 “원향 포인트 클라우드 필터링(CircleCloudsFilter)” 혹은 “포인트 클라우드 용량 필터링(CloudCapacityFilter)” 인 경우 유효합니다.기본값: 3추천값: 3, 5, 7유효 범위: [1,∞)침식 사이즈(erodeSize)
설명: 이 파라미터는 주로 침식 구조요소의 사이즈를 조절하는 데 사용됩니다. 필터링 유형(filterType)는 “원향 포인트 클라우드 필터링(CircleCloudsFilter)” 혹은 “포인트 클라우드 용량 필터링(CloudCapacityFilter)” 인 경우 유효합니다.기본값: 3추천값: 3, 5, 7유효 범위: [1,∞)