소프트웨어 및 하드웨어 시스템¶
하드웨어 시스템 구조에 대한 설명¶
메크 마인드 로보틱스 제품은 실제 응용에서 기능을 실현하기 위해 완전한 시스템을 기반으로 해야 합니다. 일반적으로 시스템에는 로봇 모듈, 카메라 모듈 및 컴퓨터 모듈 이 세 가지 주요 모듈이 포함됩니다. 3개 모듈의 통신은 이더넷으로 연결하는 것을 추천합니다.
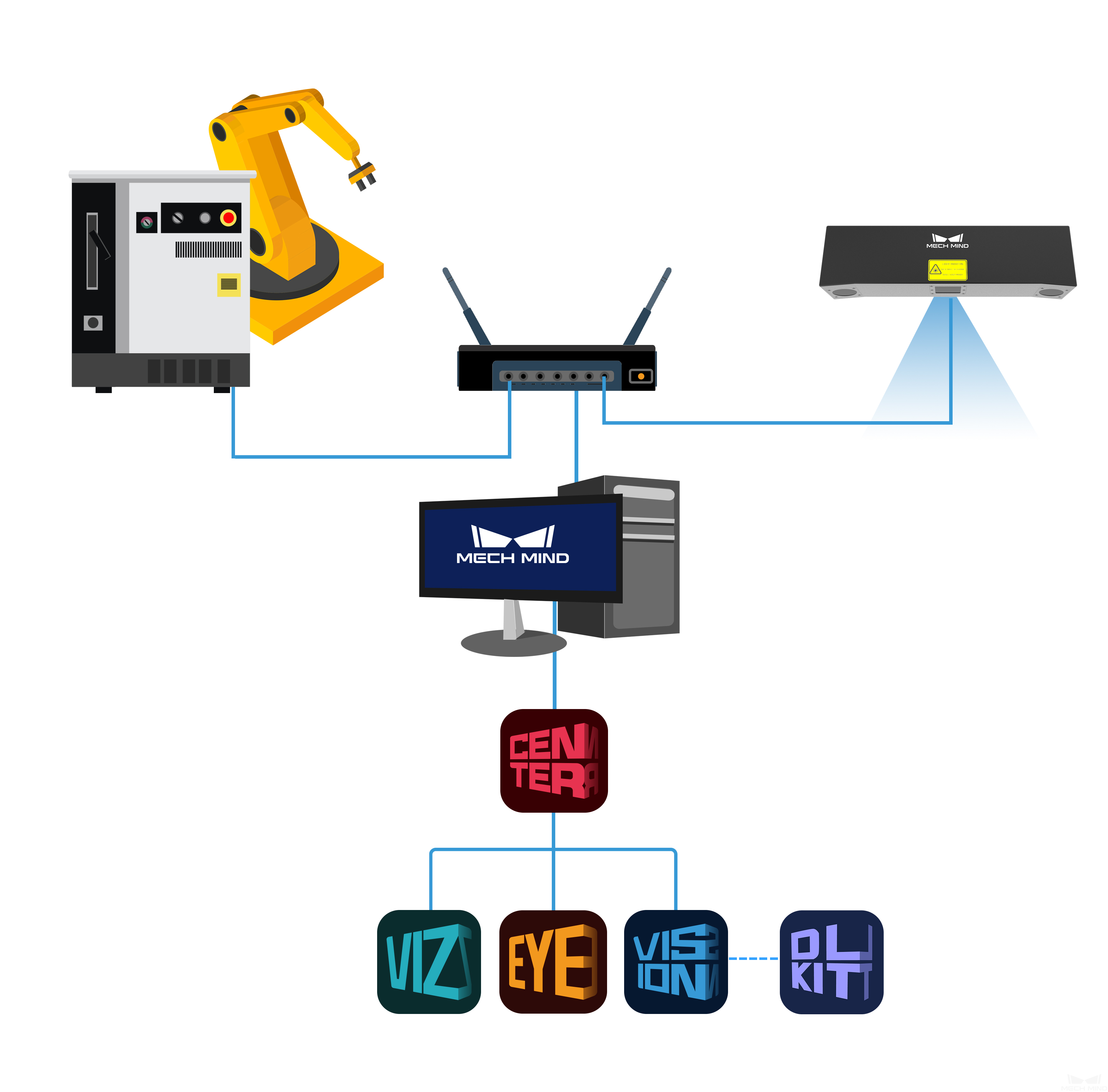
그림1 하드웨어 시스템 구성¶
소프트웨어 시스템 구조에 대한 설명¶
Mech-Mind 소프트웨어 시스템은 주로 다음과 같은 두 가지 구성 형식이 있습니다.
소프트웨어 시스템 마스터 컨트롤
대부분의 로봇은 Mech-Mind 비전 시스템에 연결되어 비전 시스템에 의해 로봇을 완전히 제어할 수 있습니다. 즉, 비전 시스템은 마스터 스테이션이고 로봇은 슬레이브 스테이션입니다. 메크 마인드 로보틱스에서 자체 개발한 Mech-Viz 소프트웨어는 로봇에 대한 완전한 제어 및 동적 시뮬레이션을 실현할 수 있으며 경로 계획, 충돌 감지 및 싱귤래리티 회피 등 많은 실용적인 기능을 가지고 있습니다.이러한 시스템 구축 방식은 응용이 보다 간단하고 로봇 프로세스 흐름이 비교적 짧은 시나리오에서 널리 사용되고 있습니다.로봇이나 호스터 컴퓨터 마스터 컨트롤
시스템이 복잡하고 로봇 프로세스가 비교적 번거로운 경우 후기 유지 관리의 편의성을 고려하여 로봇 또는 호스트 컴퓨터로 마스터 컨트롤할 수도 있습니다. 즉, 비전 시스템은 마스터 스테이션이 되며 비전 포인트 또는 간단한 경로만 보냅니다. 호스트 시스템은 적절한 시간에 카메라를 사진을 찍도록 트리거하고 비전 시스템은 이미지를 처리하여 결과를 호스터 컴퓨터에 반환하고 임시 저장하며 호스터 컴퓨터는 비전 결과가 필요할 때 직접 호출할 수 있습니다.이러한 시스템 구축 형식에서는 보통 신호 변환 및 중계를 위해 별도로 작성된 Adapter가 필요합니다. 적용되지 않은 로봇에 대해, 즉 비전 시스템이 아직 로봇을 완전히 제어하지 못한 경우 비전 포인트를 보내는 형식으로만 할 수밖에 없습니다.
Mech-Mind 소프트웨어 시스템 중 메크 마인드 로보틱스는 Mech-Center, Mech-Eye Viewer, Mech-Vision 및 Mech-Viz 소프트웨어를 자체 개발했습니다. 구체적인 내용은 Mech-Mind 소프트웨어 시스템 소개 를 참고하십시오.