Mech-Mind 소프트웨어 시스템 소개¶
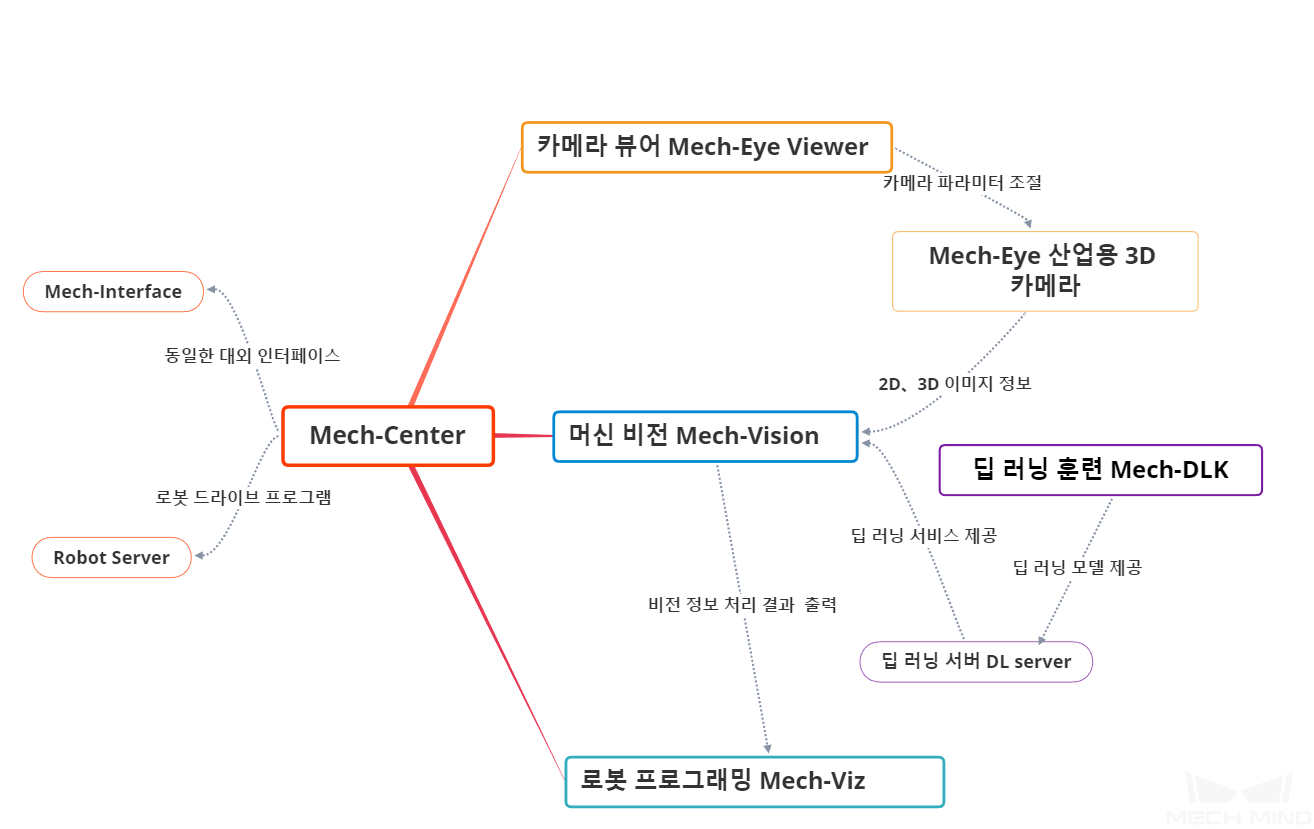
Mech-Mind 소프트웨어 시스템 관계 맵¶
- Mech-Eye Viewer 카메라 뷰어
본사에서 자체 연구&개발한 카메라 구성 소프트웨어로 대상 물체의 특징에 근거하여 Mech-Eye 산업용 3D 카메라의 각종 파라미터를 조절하고 가장 빠른 시간 내에 고품질 2D 이미지와 3D 포인트 클라우드를 획득하여 Mech-Vision 소프트웨어의 후속 처리에 기반을 마련해 줍니다.
- Mech-Vision 머신비전 소프트웨어
Mech-Vision에서 카메라를 통해 획득한 2D, 3D 이미지를 분석&처리하고 대상 물체를 인식하며 위치 및 좌표를 계산합니다. 뿐만 아니라 Mech-Vision을 통해 외부 파라미터 캘리브레이션, 픽 포인트 티칭 등 기능도 실현할 수 있습니다. Mech-Vision은 Mech-Viz와 유사하여 그래픽 노코드 프로그래밍을 통해 다양한 응용 시나리오 혹은 대상 물체에 따라 다른 인식 알고리즘을 작성하고 처리 효율을 높이면서 오류율을 낮춥니다.
- DL server 딥 러닝 서버
본사에서 자체 연구&개발한 딥 러닝 서버로 작업 현장의 소형 PC에서 딥 러닝 모델의 고효율 처리를 실현할 수 있으며 Mech-Vision 대상 물체 인식, 위치 지정 및 순서 정렬 등 처리에 도움을 줄 수 있습니다.
- Mech-Viz 로봇 프로그래밍 소프트웨어
Mech-Viz를 통해 로봇 운동 시뮬레이션, 시나리오 충돌 감지, 자동 경로 계획 및 싱귤래리티 회피 등 기능을 실현할 수 있습니다. 완전한 그래픽 프로그래밍으로 논리가 명확하고 처리 스텝이 간단하여 작업 현장의 배포 및 디버그 효율을 크게 향상시켰습니다.
- Mech-Center 통신 허브 및 제어 센터
Mech-Center는 Mech-Mind 소프트웨어 시스템의 컨트롤 센터로 본사 소프트웨어 제품에 대한 전반 설정, 상태 확인 및 데이터 전송 등 기능을 실현할 수 있습니다. 또한 프로젝트의 구체적인 수요에 근거하여 맞춤형 이차 개발이 가능하며 외부 시스템과 통신할 수 있는 인터페이스도 함께 제공합니다.
- Mech-Interface
Mech-Interface는 (Mech-Vision 혹은 Mech-Vision + Mech-Viz 조합)의 동일한 대외 인터페이스로 외부(PLC、로봇、호스트 컴퓨터)와 통신하는 데 사용되고 표준 인터페이스와 어댑터로 나눠집니다.
표준 인터페이스는 상대의 명령을 받고 비전 출력 결과를 제공할 수 있지만 로봇 컨트롤을 할 수 없습니자. 현재 표준 TCP Server와 Siemens Snap7 인터페이스를 제공합니다.
어댑터는 일반 인터페이스가 실현하지 못하는 맞춤화 프로젝트에 사용됩니다. 본사에서 제공된 어댑터 생성기를 통해 맞춤형 어댑터를 생성하여 Mech-Mind 소프트웨어 시스템의 대외 인터페이스로 상대의 명령을 받고 Mech-Viz 혹은 Mech-Vision 프로젝트를 실행하는 데 사용됩니다.
- Robot Server
Robot Server는 본사에서 자체 연구&개발한 로봇 드라이버 프로그램으로 대부분의 주류 로봇 브랜드 및 중국산 로봇에 적용될 수 있으며 로봇에 대한 완전한 컨트롤을 실현할 수 있습니다. 간단한 로봇 프로그램만 통해 Mech-Mind 소프트웨어 시스템과 연결되어 Mech-Viz를 사용하여 간결하고 고효율적인 노코드 프로그래밍을 실현할 수 있습니다.
- Mech-DLK 딥 러닝 소프트웨어
Mech-DLK는 메크마인드 로보틱스에서 자체 연구&개발한 딥 러닝 소프트웨어로 Mech-Vision에 사용되는 딥 러닝 모델을 쉽게 구축할 수 있습니다.