キャリブレーションの操作手順¶
本節を開始する前に、以下のことを確認してください。
ロード手順 を参照してロボットプログラムのロードを完了し、Mech-Centerとの接続を確立しました。
ロボットハンド・アイ・キャリブレーションの使用ガイド を把握しました。
本節で紹介する自動キャリブレーションは、インターフェイスを介して、複数のキャリブレーションポイントでデータを取得します。以下の場合、本節をスキップしてください。
ビジョンシステムによるティーチングが可能であれば、Mech-Vizでキャリブレーションポイントを可視化して確認できるため、直に Mech-Vision から 自動キャリブレーション を実行することを推奨します。
インターフェイスでキャリブレーションを行うが、必要な撮像枚数が少ない場合は、 手動キャリブレーション を実行できます。

キャリブレーションの初期位置を設定¶
ティーチペンダントでロボットをキャリブレーションの初期位置に移動して、この位置を記録します。
ロボットを手動でキャリブレーションの初期位置に移動します。
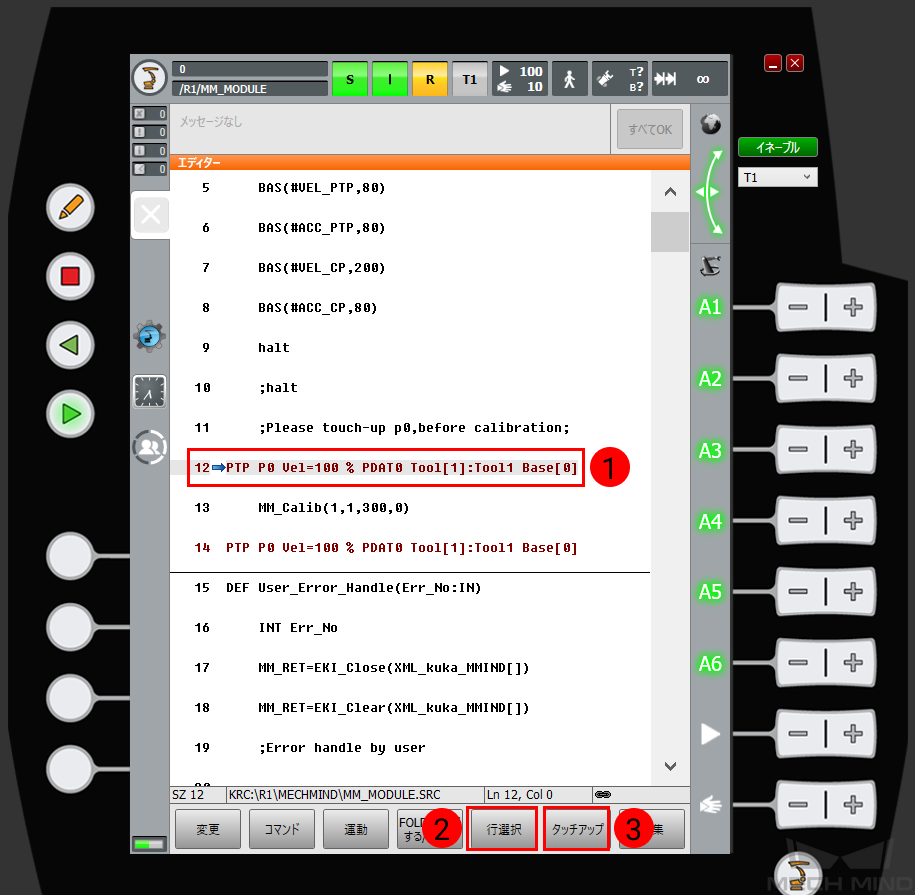
ティーチペンダントでカーソルを11行目に移動したら、 行選択 、 タッチアップ を順番にクリックします。
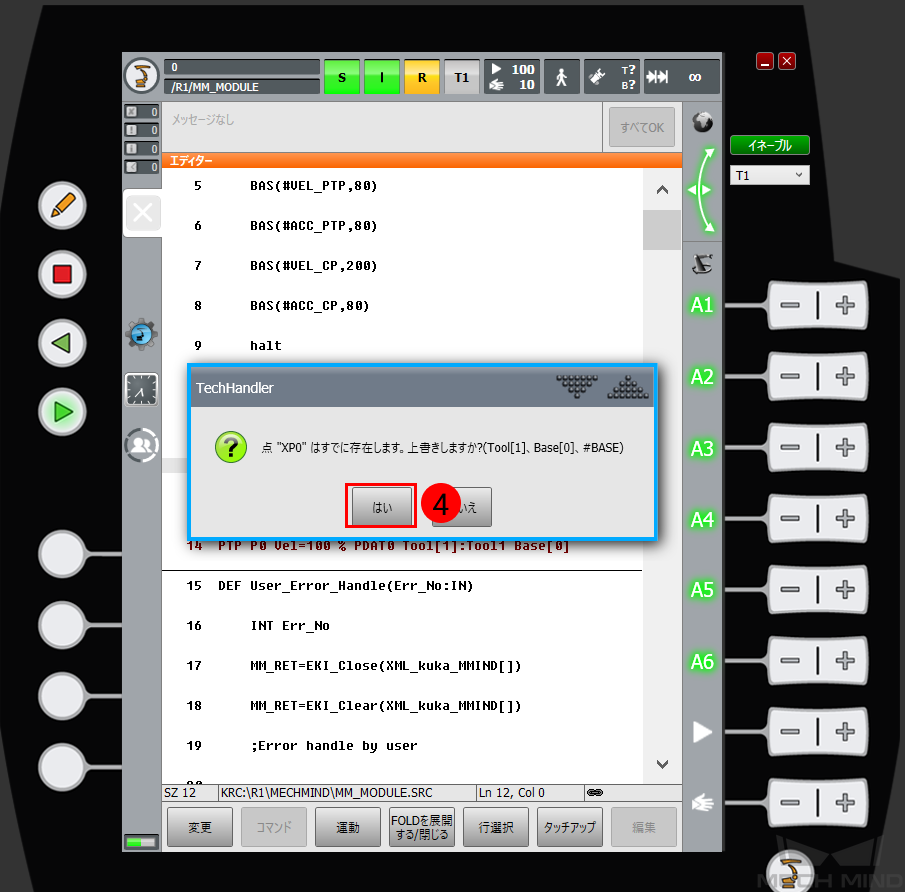
ポップアップ画面に はい をクリックするとキャリブレーションの初期位置への設定は完了します。
プログラムを実行¶
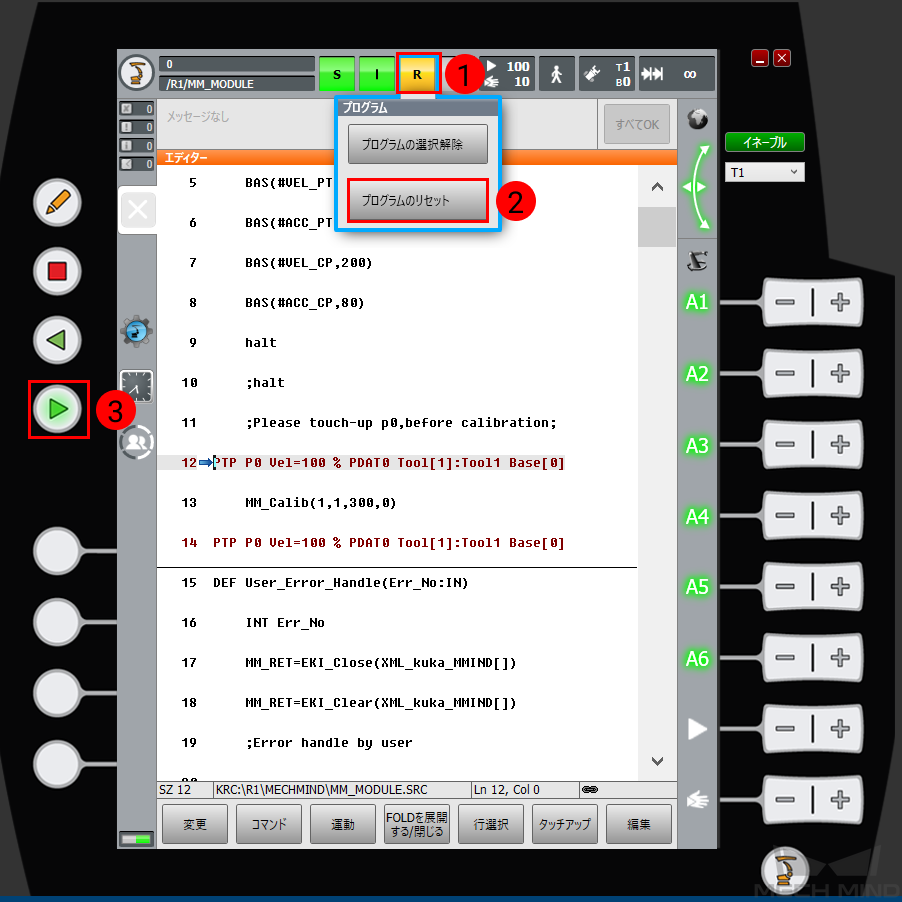
R をクリックし、ポップアップメニューで プログラムのリセット をクリックした後、プログラムを実行します。
キャリブレーションを実行するには、以下の2つのメッセージが必要です。
ティーチペンダントの画面に「Calibration Start!」が表示されます。
Mech-Centerのログに「キャリブレーションプロセスに入ります。Mech-Visionでキャリブレーションを開始してください」が表示されます。
それで、キャリブレーションを実行することができます。
Mech-Visionでキャリブレーションを実行¶
Mech-Visionを起動し、 カメラキャリブレーション(標準モード) をクリックするか、またはメニューバーで を順番にクリックしてキャリブレーションツールを起動します。
ソフトウェアのプロンプトに従って以下の設定を行ってください。
新たなキャリブレーションを開始 にチェックを入れます。
カメラの取り付け方式を選択します。
その後、 ランダムな複数キャリブレーションボード位置姿勢 を選択してキャリブレーション画面に入ります。この画面で接続されたロボット型番が表示されます。表示されていない場合は接続に異常あります。それを解決するために、ロボットプログラムを再実行してください。
プロンプトに従ってキャリブレーションを完了します。また、 キャリブレーションの実行手順 を参照して行うことができます。
注釈
既定経路に沿ってロボットを移動して画像を取得 をクリックした後、ロボットが60秒以内に次のポイントに到達しない場合、タイムアウトエラーが発生します。この場合、ティーチペンダントで mm_module.src を再度選択してプログラムを実行し、Mech-Visionでキャリブレーションを再開する必要があります。