複数の段ボール箱を把持+単一の長方形吸盤¶
調整可能なパラメータは下図に示します。
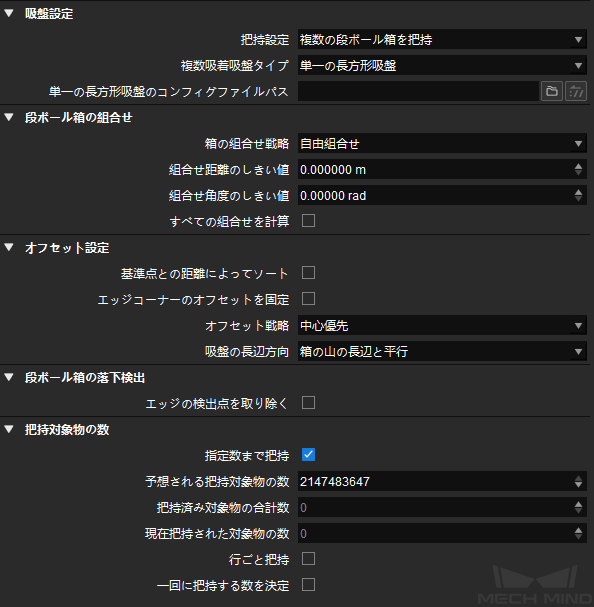
吸盤設定
- 単一の長方形吸盤のコンフィグファイルパス
 をクリックして吸盤のコンフィグファイルを選択します。吸盤コンフィグレータ を使用して吸盤を設定し、jsonファイルをエクスポートすることができます。
をクリックして吸盤のコンフィグファイルを選択します。吸盤コンフィグレータ を使用して吸盤を設定し、jsonファイルをエクスポートすることができます。
段ボール箱の組合せ
- すべての組合せを計算
異なる 箱の組合せ戦略 に含まれる可能な組み合わせを全部計算します。詳しくは 段ボール箱の組合せ をお読みください。
オフセット設定
- オフセット戦略
- 中心優先:オフセットがない(吸盤の中心と箱の中心が重なる)位置姿勢を優先に試行します。失敗したらオフセットがある(中心が外れる)位置姿勢を試行すます。コーナー優先:オフセットのない位置姿勢を最後に試行します。コーナーだけ:オフセットのない位置姿勢を試行しません。中心優先 を選択すれば衝突を回避できるので混載デパレタイジングに適しています。物体を把持してから、コンベアに配置するなど、混載パレタイジングを実行しなければ選択する必要はありません。
- 基準点との距離によってソート‐基準点X/Y座標
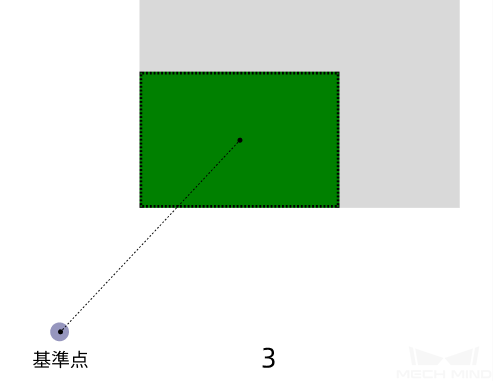
- 調整説明:このパラメータを使用するには、基準点座標を設定する必要があります。把持を計画する際に、ツールを基準点に近づけるように経路を計画します。ただし、対象物の対称性と同時に設定することはできません。調整の例:下図(上面図)では、緑色の部分は箱で、灰色の部分は単一吸着の吸盤です。この場合に、四つの把持方法があります。
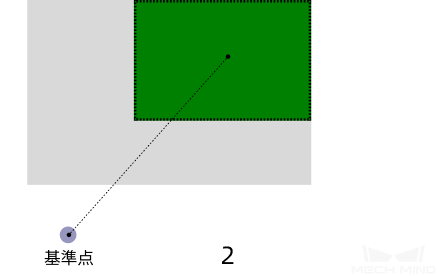
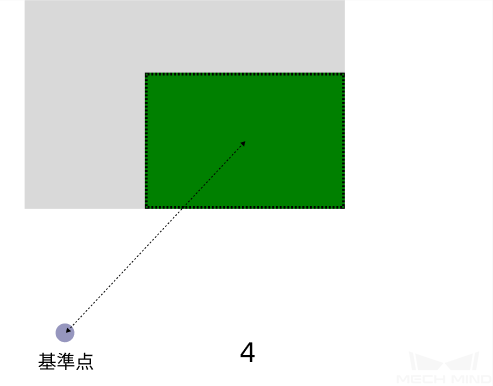
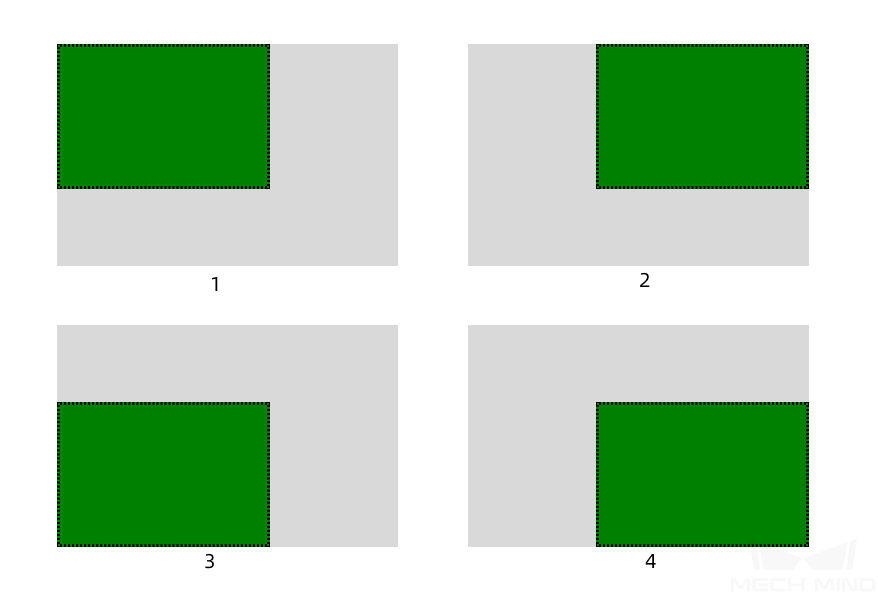 基準点を箱の左下隅に設定します。基準点と箱の相対位置は固定されており、把持を計画する時に、ツールが基準点に近い位置を優先に試行します。従って下図に示すように、優先試行の順序は: 。
基準点を箱の左下隅に設定します。基準点と箱の相対位置は固定されており、把持を計画する時に、ツールが基準点に近い位置を優先に試行します。従って下図に示すように、優先試行の順序は: 。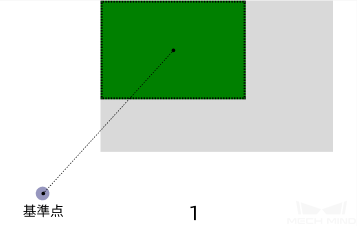
- 優先度の高いオフセットのみを保持‐計画解の最大数
- 調整説明:初期値は2です。基準点の計画回数に応じて設定します。調整の例:上記の例では、このパラメータの値を2に設定したら、2と1のみを保持します。
- エッジコーナーのオフセットを固定‐エッジコーナーのラベル番号
- 吸盤の番号を入力します。吸盤エッジコーナーの番号付けルール:吸盤の番号は0~8の数字を使います。0は中心点、1、3、5、7はコーナー、2、4、6、8はエッジの番号です。吸盤のパーティション番号と吸盤の番号の組合せは、エッジコーナーの番号になります。
詳しくは 抓取偏置策略 をお読みください。
段ボール箱の落下検出
使用シーン
段ボール箱把持の現場では、箱が正常に把持されているか、またはロボットが箱を搬送しているときに落下を検出するために、吸盤の吸着面にDI検出点を追加します。
事前準備:
に使用する吸盤コンフィグファイルを選択します。吸盤設定については、吸盤コンフィグレータ をお読みください。
设置多个 DO と組み合わせて使用します。「視覚処理による移動」からDOリストを取得 にチェックを入れ、視覚処理による移動 を選択します。
检查多个 DI と組み合わせて使用します。「視覚処理による移動」からDIリストを取得 にチェックを入れ、視覚処理による移動 を選択します。
調整の例:
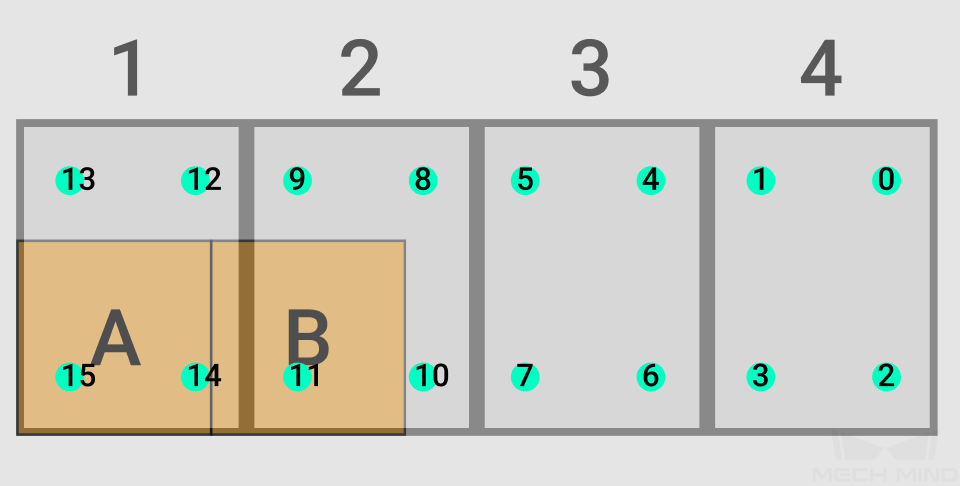
下図に示すように、吸盤に四つのパーティションに分けられており、各パーティションに四つのDI検測点があります。箱Aと箱Bの組合せを把持する時、ソフトウェアでは使用するパーティションを決定します。パーティション1と2を使用し、さらにパーティション1と2のDI検測点8、9、10、11、12、13、14、15を使用します。
- エッジの検出点を取り除く
DIを使用して箱の落下を検出するとき、DI検測点が箱のエッジにある場合に、把持位置の外れやエッジ吸着力不足、箱の変形などに起因する検測点信号エラーによる落下の誤検知が発生します。このような誤検知を防止するために、箱のエッジを取り除く距離 を設定し、把持する箱のエッジのDI検測点を取り除きます。
- 箱のエッジを取り除く距離
箱のエッジから内側への距離を設定します。設定した値以内のDI検測点は落下検出を実行しません。シミュレーションエリアでは、エッジDI検測点を取り除かれた部分は赤で表示されます。
把持対象物の数
把持する対象物の数をカウントし、残りの対象物の数を自動的に計算します。 予想される把持対象物の数 に注文の数を入力すれば、注文の把持数のカウントと残りの数の自動的計算を実現できます。
- 予想される把持対象物の数
把持する対象物の最大値。
- 把持済み対象物の合計数
把持した対象物の合計数です。ソフトウェアでは自動的に計算するので、手動で変更することはできません。
- 現在把持された対象物の数
現在ロボットが把持した対象物の数です。ソフトウェアでは自動的に計算するので、手動で変更することはできません。
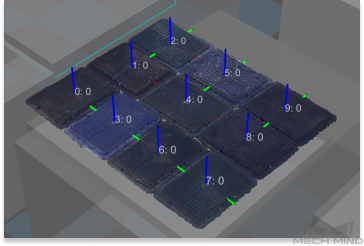
- 行ごと把持
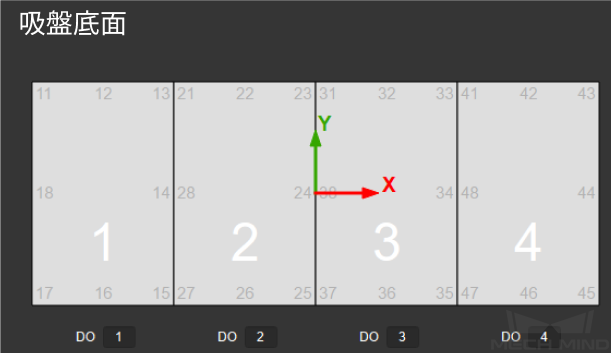
- 調整説明:箱の組合せる方向の両端に別の箱があるかどうかをチェックします。なければこの組合せを保持し、あれば放棄します。このパラメータは 段ボール箱の組合せ の 縮小比例のしきい値 と組み合わせて使用されます。調整の例:箱をY軸(下図の緑の軸)に沿って組合せます。組合せの形式は [0,3,6,7]、[1,2]、[4,5] 、 [8,9] になります。その内、Y軸の端に箱がない組合せは [0,3,6,7] だけなのでこれを最初に把持し、残りの組合せを放棄します。
- 一回に把持する数を決定
一回に把持する数を決定します。ソフトウェアでは把持する数と一致する組合せを把持します。一致する組合せがなければ、把持を実行しません。プロジェクトは、出口 他の失敗 を実行します。
- 一回に把持する数
一回に把持する数を入力します。1以上の整数でなければなりません。