ようこそ
最初の応用を始める
ソフトウェアの使用ガイド
ロボットの通信設定
応用ガイド
付録
機能のディスクリプション
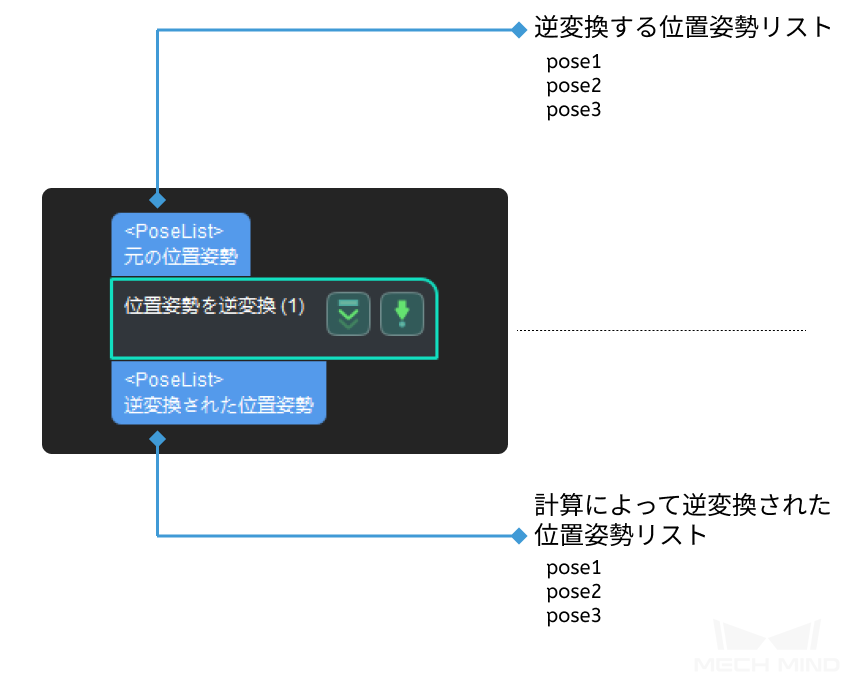
入力リストにある位置姿勢を逆変換します。
使用シーン
汎用の位置姿勢計算ステップで、基準座標系間の変換に使用できます。
入力と出力