ようこそ
最初の応用を始める
ソフトウェアの使用ガイド
ロボットの通信設定
応用ガイド
付録
機能のディスクリプション
位置姿勢に対して、座標系の変換、並進、回転およびソートなどの処理を行います。
使用シーン
汎用の位置姿勢調整ステップで、パラメータ「演算子」は「位置姿勢ステップ・エディタ」の入口として機能します。
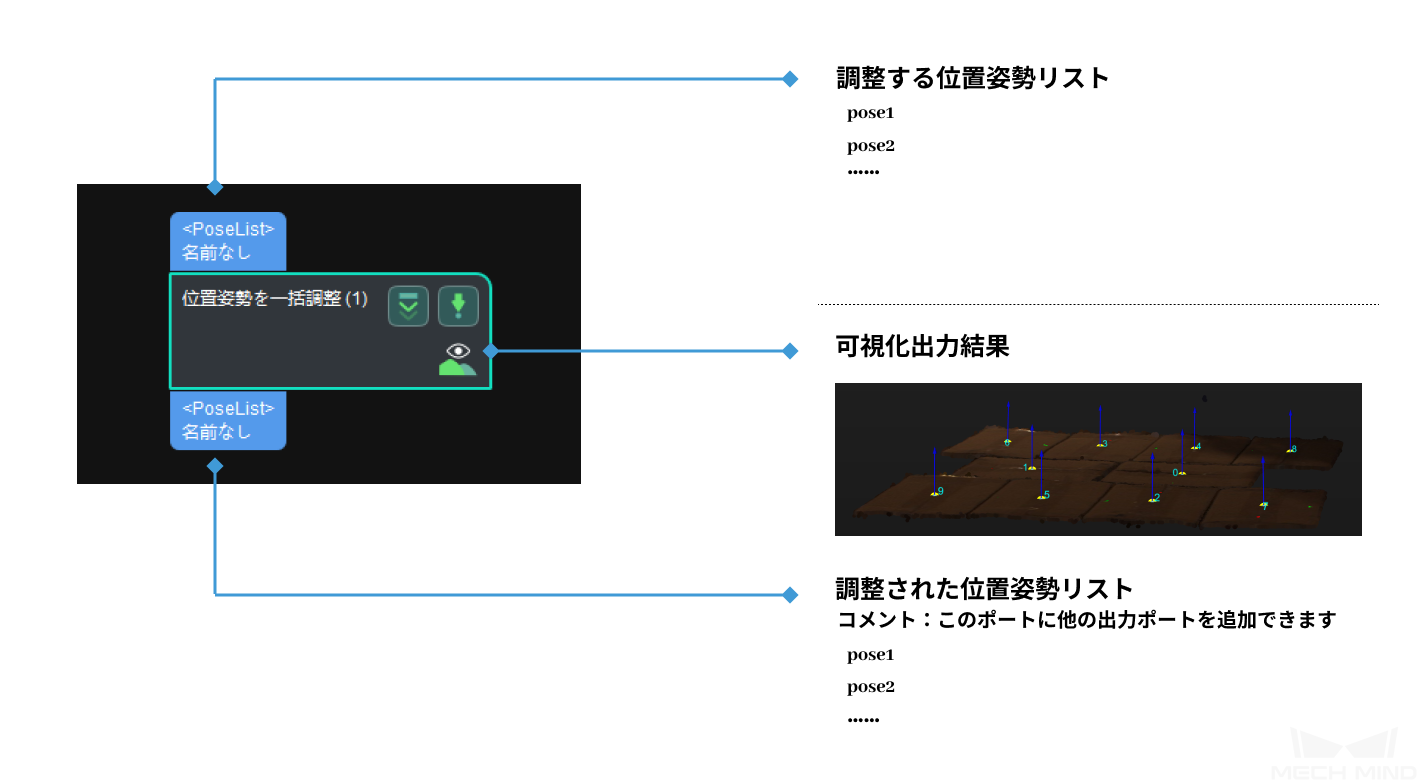
入力と出力