3D点群を2D画像に投影¶
機能のディスクリプション
指定された投影タイプに従って3D点群を2D画像に変換します。
使用シーン
このステップは点群前処理に使用されます。まずは3D点群を2D画像に投影し、2D画像処理方法(例えば2Dモフォロジー)を使用した後 マスク内の対応する点群を抽出 で3D点群に戻します。
把持シーンでは、 「PerspectiveProjection」 の投影タイプを推奨します。
測定シーンでは、ステップ 正投影 を使用することをお勧めします。
入力と出力
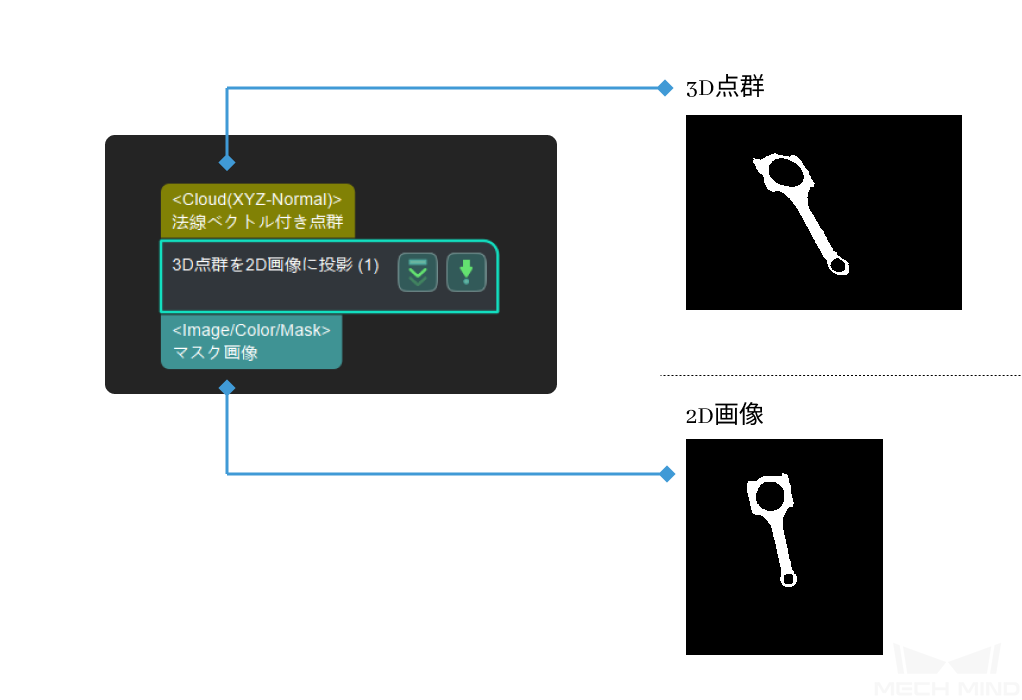
パラメータの説明
正投影
正投影を使用
初期値:チェックを入れないオプション:チェックを入れる/チェックを入れない調整説明:正投影を使用して3D点群を2D平面に投影します。対象物のZ軸に沿って投影
初期値:チェックを入れるオプション:チェックを入れる/チェックを入れない調整説明:実際のニーズに応じて投影軸を選択します。クロージング処理のカーネルサイズ
初期値:7調整説明:狭い不連続部と小さなギャップと穴を埋めるために使用されます。カーネルが大きいほど、効果がより明確になります。透視投影
画像タイプ
初期値:Colorオプション:Color、 Depth調整説明:プロジェクトにカラー画像と深度画像がある場合、対応するカメラに投影することを選択できます。膨張処理カーネルサイズ
初期値:21調整説明:画像の強調表示された部分または白い部分を拡張すると、カーネルが大きくなり、効果がより明確になります。収縮処理カーネルサイズ
初期値:21調整説明:画像の強調表示された部分または白い部分を縮小すると、カーネルが大きいほど、効果がより明確になります。