ようこそ
最初の応用を始める
ソフトウェアの使用ガイド
ロボットの通信設定
応用ガイド
付録
機能のディスクリプション
位置姿勢リストの最初のN項目を保持して出力します。第N項目以降のデータは破棄されます。
使用シーン
リストの最初のN項目を抽出し、Nの値はニーズに応じてパラメータの中で設定可能です。
このステップは古いバージョンであり、位置姿勢に関連するデータのリストにしか適用されません。代わりにより一般的なステップ 出力の数を制限 を使用してください。
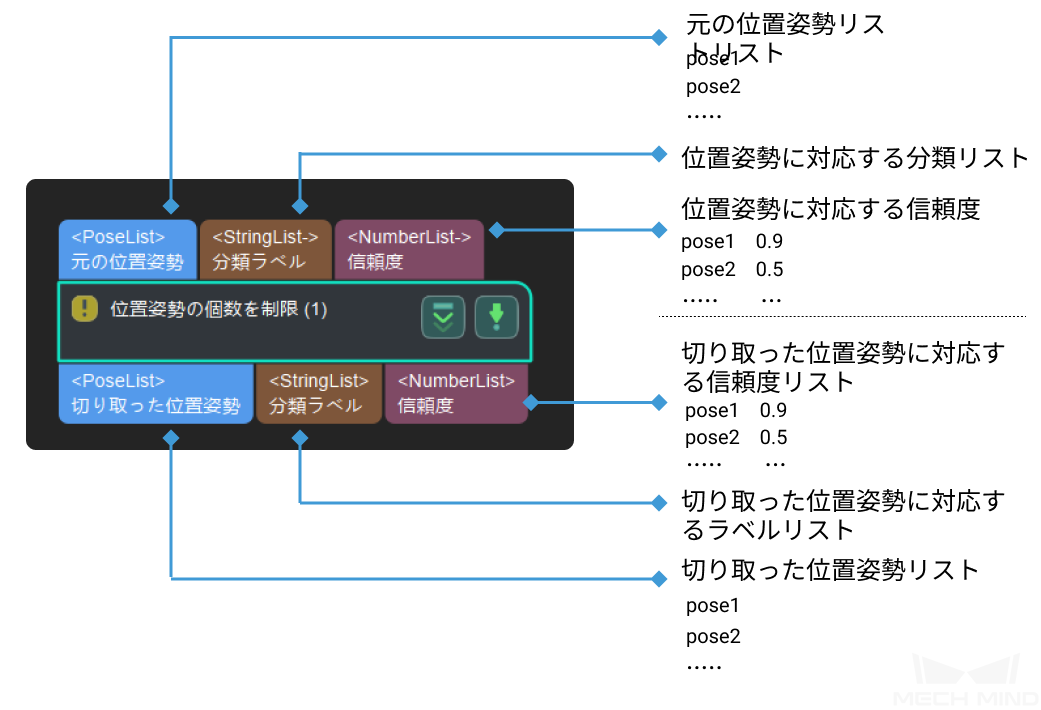
入力と出力
パラメータの説明
出力位置姿勢の数 初期値:1 調整説明:出力位置姿勢の数を指定します。
出力位置姿勢の数
初期値:1 調整説明:出力位置姿勢の数を指定します。