把持位置姿勢を予測(同じタイプ)¶
使用シーン¶
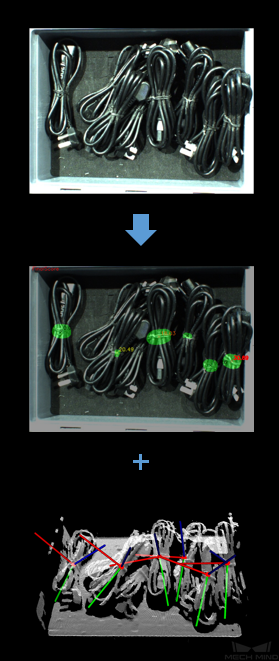
このステップは通常、同じ種類のバラ積み対象物の仕分けに使用されます。
注意
このステップにモデルをインポートした後、モデルファイルは、ディープラーニングサーバーが呼び出すための「.engineファイル」に自動的に変換されます。変換プロセスはコンピュータのグラフィック カードに依存するため、変換された「.engineファイル」ファイルを他のコンピュータにコピーしないでください。
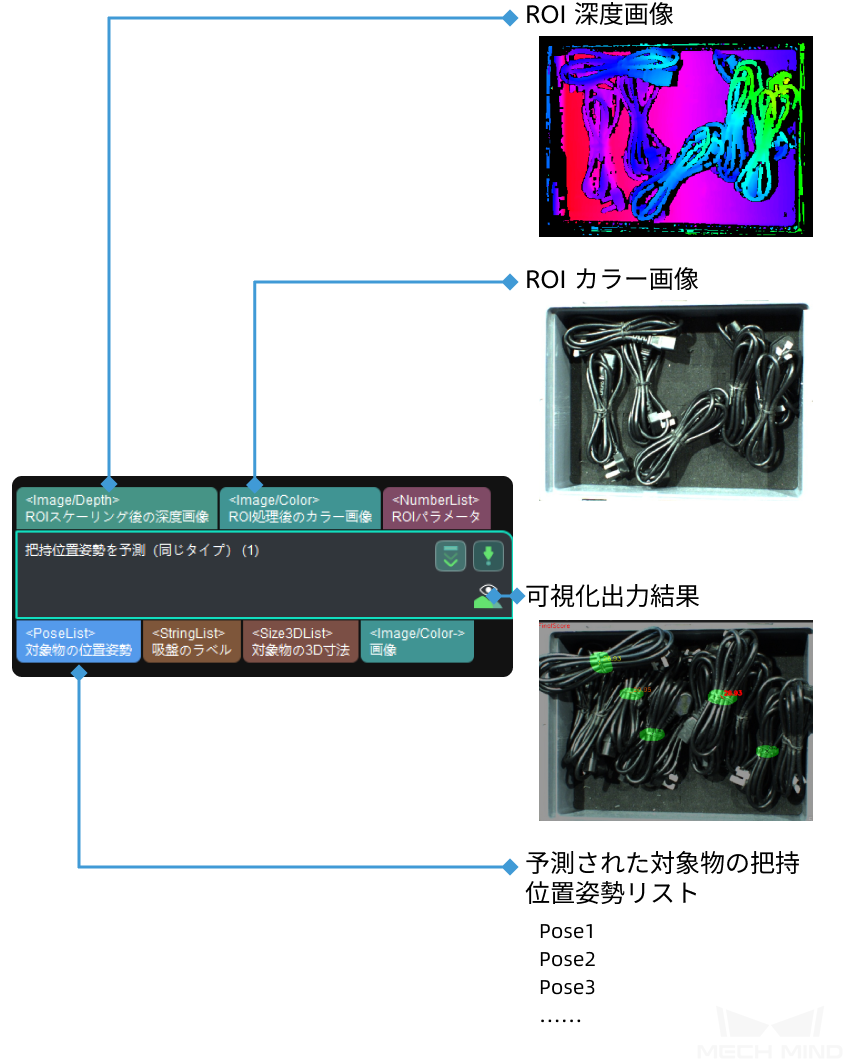
入力と出力¶
パラメータの調整説明¶
サーバー
- サーバーIP
- 初期値:127.0.0.1調整説明:実際の状況に応じてディープラーニングサーバーIPを設定してください。
- サーバーポート(1~65535)
- 初期値:60054調整説明:ディープラーニングサーバーのポート番号を設定します。ポート番号を60000~65535に設定する必要があります。
注意
プロジェクトを開いた後、ディープラーニングサーバーが正常に起動するまで、つまりログ列に「ディープラーニングサーバーの起動に成功しました。」という情報が表示されるまで待ってから、プロジェクトを実行する必要があります。
モデルパス
初期値:なし。調整説明:プロジェクトを実行する前にディープラーニングモデルパスを入力する必要があります。モデルファイルの拡張子は .onnxです。モデルを取得する場合、Mech-Mind株式会社にお問い合わせください。
注意
このステップを初回実行するときは、モデルの読み込みに時間がかかるため、しばらくお待ちください。
稼働距離
- 最小稼働距離
- 初期値:0調整説明:カメラからシーン内の物体までの最短距離(メートル単位)です。箱を使用する場合、このパラメータをカメラの底部から箱の上端までの距離に設定してください。実際のニーズに応じて設定してください。
- 最大稼働距離
- 初期値:3000調整説明:カメラからシーン内の物体までの最長距離(メートル単位)です。箱を使用する場合、このパラメータをカメラの底部から箱の下端までの距離に設定してください。実際のニーズに応じて設定してください。
箱の設定
- 箱を使用
- 初期値:チェックを入れない。詳細については、 把持位置姿勢を予測(複数の対象物のタイプ) をご参照ください。
有効化
詳細については、 把持位置姿勢を予測(複数の対象物のタイプ) をご参照ください。
位置姿勢のソート論理
このパラメータは、認識された位置姿勢が位置姿勢のスコアに従って降順に並べ替えられます。位置姿勢のスコアは、位置姿勢の高さ * 位置姿勢の高さの重み + X軸における偏差角度 * X軸における把持位置姿勢の偏差の重み + Y軸における偏差角度 * Y軸における把持位置姿勢の偏差の重み となります。
位置姿勢の高さは、把持位置姿勢とカメラの底面との間の距離 (mm) を指します。
X軸における偏差角度:把持位置姿勢のX軸とロボット座標系X軸との偏差角度です。
Y軸における偏差角度:把持位置姿勢のY軸とロボット座標系Y軸との偏差角度です。
次のパラメータは、位置姿勢のソートに関連する重みを設定するために使用されます。
- 位置姿勢高さの重み
- 初期値:3オプション:1、2、3調整説明:このパラメータは、位置姿勢のスコアを計算するときに位置姿勢の高さの重みを設定するために使用されます。
- X軸における把持位置姿勢の偏差の重み
- 初期値:1オプション:0、1、2、3調整説明:このパラメータは位置姿勢のスコアを計算するときに把持位置姿勢のX軸とロボット座標系のX軸との偏差角度重みを設定するために使用されます。パラメータを0に設定する場合、把持位置姿勢のX軸の偏差角度が位置姿勢の計算に関与しません。
- Y軸における把持位置姿勢の偏差の重み
- 初期値:1オプション:0、1、2、3調整説明:このパラメータは位置姿勢のスコアを計算するときに把持位置姿勢のY軸とロボット座標系のY軸との偏差角度重みを設定するために使用されます。把持位置姿勢のY軸は対象物の最長スパンの方向と一致します。パラメータを0に設定する場合、把持位置姿勢のY軸の偏差角度が位置姿勢の計算に関与しません。
垂直方向から把持
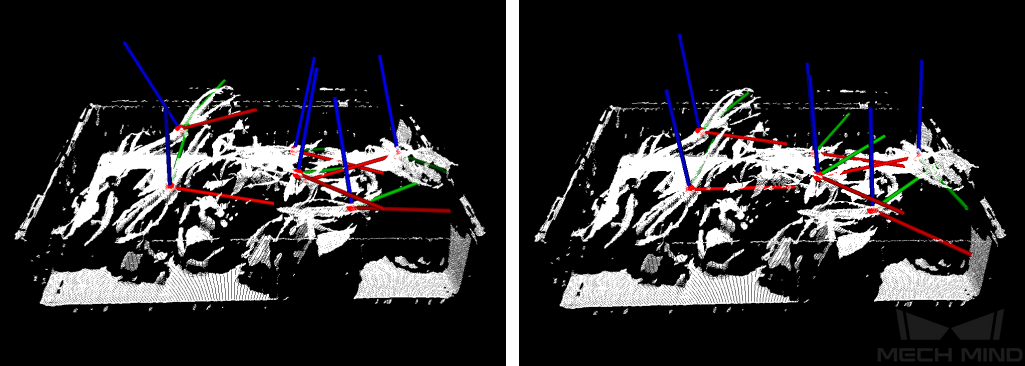
- 垂直把持モード
- 初期値:チェックを入れる。調整説明:チェックを入れると、対象物の位置姿勢が変更され、Z軸が垂直上向きになります。下図に示すように、左側はチェックを入れる前の対象物のZ軸が指定方向を向いていない状態、右側はチェックを入れた後の対象物のZ軸が垂直上向きになっている状態です。