3D位置姿勢低精度推定(V2)¶
機能のディスクリプション¶
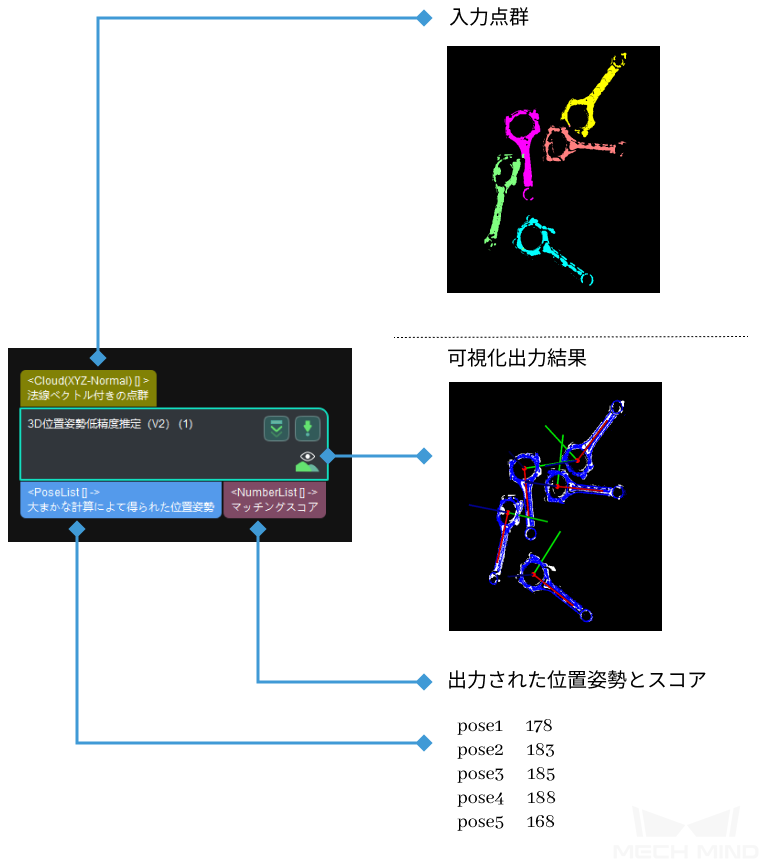
点群モデルは元の点群と大まかなマッチングを行い、対象物の大まかな候補位置姿勢が出力されます。
使用シーン¶
通常、シーンの点群に対象物を見つけてその大まかな候補位置姿勢を取得するために使用されます。このステップは、ステップ 3D位置姿勢高精度推定 とよく併用されます。
入力と出力¶
パラメータの説明¶
パラメータのデバッグレベル
基本設定
モデル設定
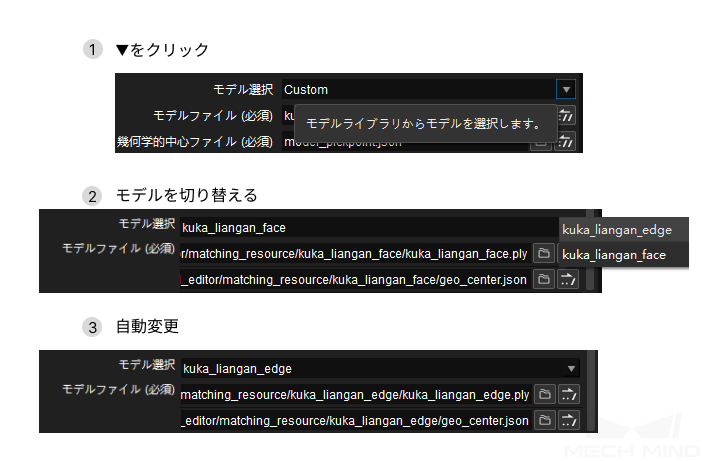
- モデル選択
調整説明:右側のドロップダウンボタンをクリックして、モデルファイルと対応する幾何学的中心ファイルをすばやく選択して切り替えることができます。モデルの選択は、モデルライブラリ (プロジェクトフォルダのresource3d_matching)にあるモデルファイルと対応する幾何学的中心ファイルのみを選択できます。詳細については、 マッチングモデル・把持位置姿勢エディタ をご参照ください。
- モデルファイル
調整説明:
をクリックして、ply形式のモデル点群ファイルを選択します。
モデルファイルの構築は、点群モデルの生成に関係します。詳細については、 点群モデルを生成 をご参照ください。
- 幾何学的中心ファイル
調整説明:
幾何学的中心ファイルの構築は、把持位置姿勢追加に関係します。詳細については、 位置姿勢を追加して把持位置姿勢を追加 をご参照ください。
- マッチングモード
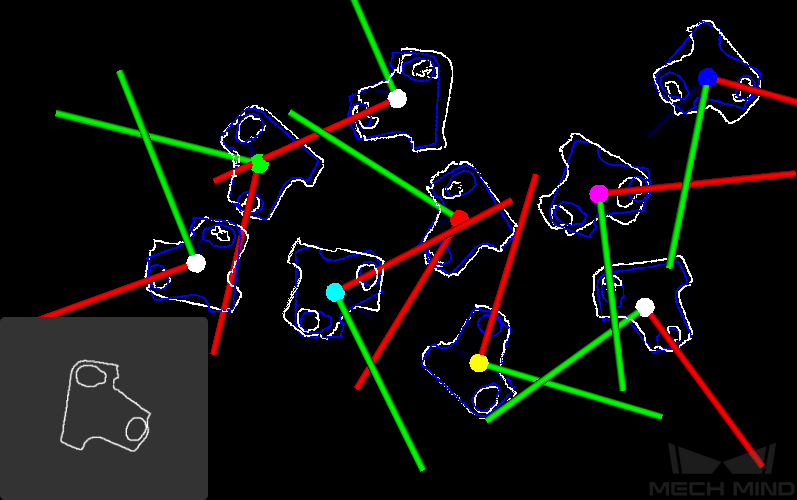 下図に示すように、使用するモデル点群が対象物の面である場合は、表面マッチングを選択します。
下図に示すように、使用するモデル点群が対象物の面である場合は、表面マッチングを選択します。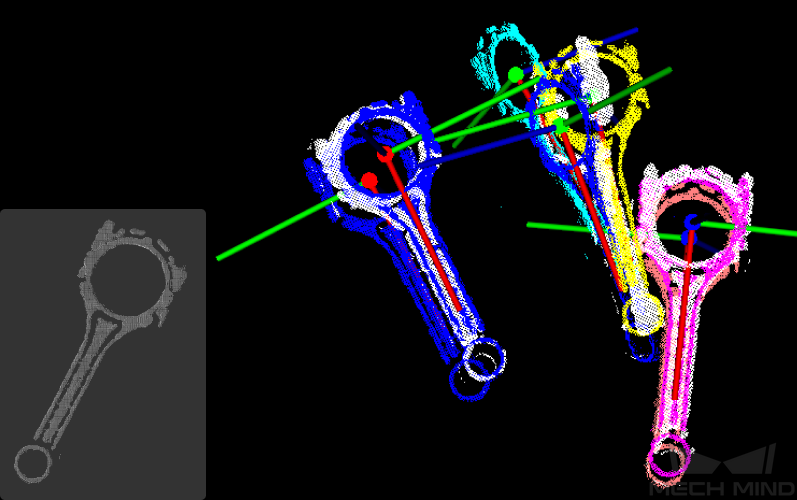
前処理設定
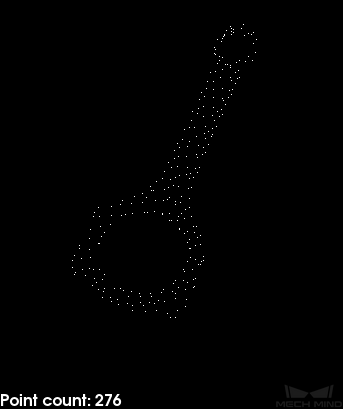
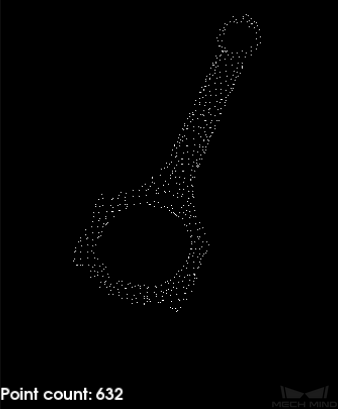
- サンプリングされたモデルの期待点数
パラメータ値
300
600
サンプル図
点の数
276
632
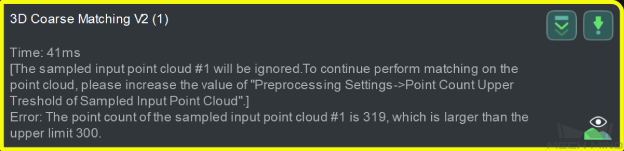
- サンプリング後の入力点群の点の最大数
位置姿勢検証設定
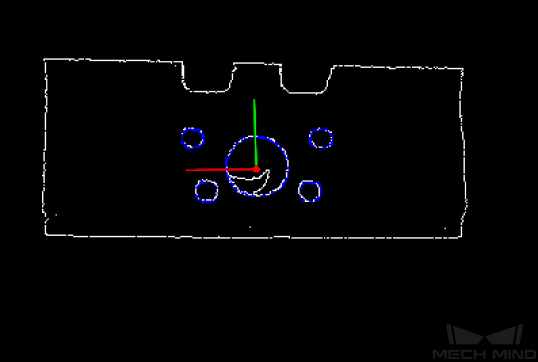
- 単一点群の結果の期待数
パラメータ値 |
1 |
3 |
出力のサンプル図 |
|
|
詳細設定
投票設定
- 単一特徴に含むポイントペアの最大数
- 距離の定量化
- 角度の定量化
- 最大投票率
- 参考点のサンプリングステップサイズ
- 参考される点のサンプリングステップサイズ
位置姿勢フィルタリング設定
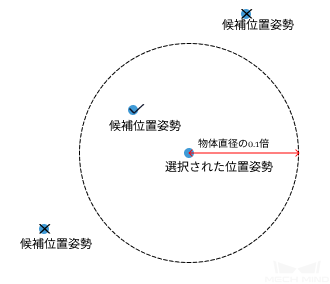
- 位置姿勢距離に基づいた非最大抑制を使用
- 指定軸の角度に基づいて候補位置姿勢をフィルタリング
位置姿勢検証設定
点群における空間は3D グリッドに分割され、 ボクセル長さ* はD グリッドの最小単位のサイズです。
- ボクセル長さの生成戦略
- ボクセルの長さ
- 最小ボクセル長さ
- 最大ボクセル長さ
結果の可視化設定
可視化オプション |
サンプル図 |
サンプリング後のモデル |
|
サンプリング後のシーン |
|
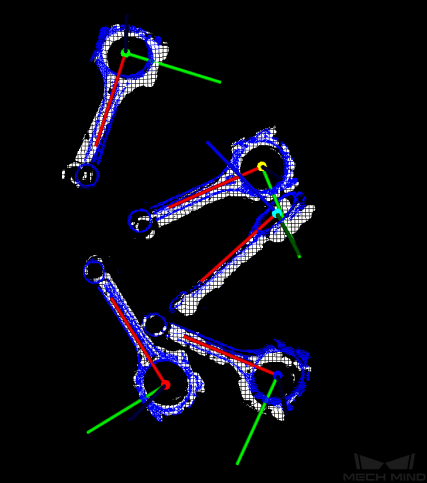
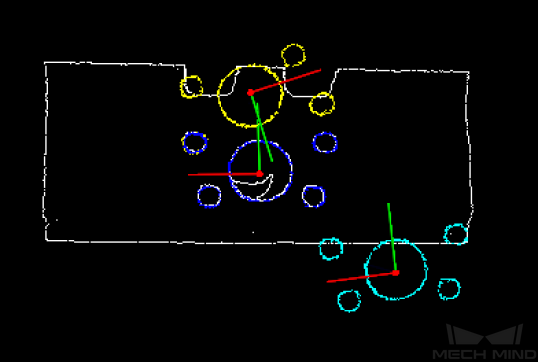
マッチング結果 |
|
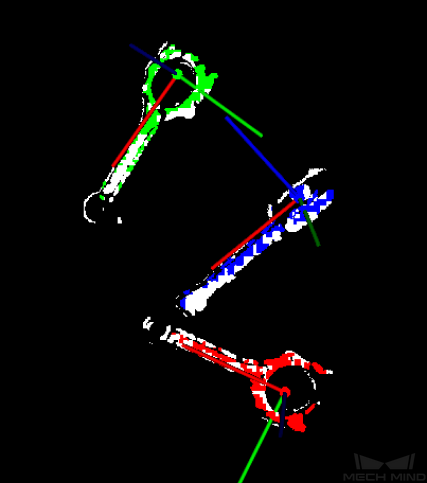
位置姿勢検証中に点の使用状況 |
|