Adapterの概要¶
Adapterの紹介¶
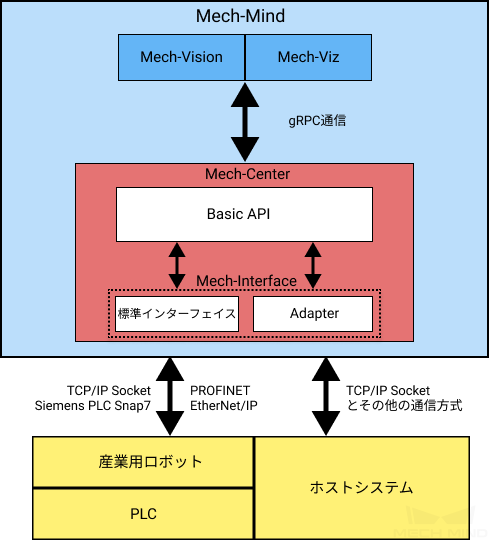
AdapterはMech-Centerソフトウェア内の通信コンポーネントです。Basic APIインターフェイスを介してMech-Visionおよび Mech-VizとのgRPC通信を行い、TCP/IP Socket、HTTPおよびPLCプロトコル(例えば:三菱 PLC MC プロトコル)などの様々な一般的な産業用通信方式を介して外部デバイスと通信します。
Adapterの使用シーンについては、 使用シーン をご参照ください。
Adapterの機能¶
Adapterは次の機能に対応します。
内部でMech-VisionおよびMech-Vizソフトウェアの制御を実現できます。
タイプ |
機能 |
Mech-Vision関連 |
Mech-Visionを実行して視覚結果を取得します |
Mech-Visionのステップパラメータを設定します |
|
Mech-Visionのステップパラメータを読み取ります |
|
Mech-Visionのパラメータレシピを切り替えます |
|
Mech-Viz関連 |
Mech-Vizを起動します |
Mech-Vizを停止します |
|
Mech-Vizのタスクパラメータを設定します |
|
Mech-Vizのタスクパラメータを読み取ります |
|
治具の番号を設定します |
|
ロボットの動作速度を設定します |
|
点群衝突検出のパラメータを設定します |
|
Mech-Vizの実行状態を取得して返します |
|
その他 |
詳細については、 Adapterプログラミングのガイド をご参照ください。 |
外部でユーザーインターフェイス、データベース、ファイルの読み書き、Webシステムとの通信などの視覚に関連しない機能を実現できます。
外部通信機能は、Pythonプログラミングによって開発および実装する必要があります。
Adapterの開発¶
TCP/IP Socketプロトコルの場合、Mech-Center は Adapterジェネレーター を提供し、Adapterを初めて使用するユーザーが Adapterプロジェクトをすばやく生成することに役立ちます。詳細については、 Adapterジェネレーターのマニュアル をご参照ください。
既存のAdapterに基づいて、プロジェクトのカスタマイズ開発を行うことができます。
Adapterプロジェクトを最初から作成することもできます。詳細については、 Adapterプログラミングのガイド と Adapterのプログラミング例 をご参照ください。
Adapterプロジェクトの設定¶
Adapterプロジェクトを作成したら、以下の手順に従ってAdapterプロジェクトを設定できます。
Mech-Centerソフトウェアを起動し、ツールバーの 設定 をクリックします。
下図に示すように、 設定 画面の左側で Mech-Interface をクリックし、 Mech-Interfaceを使用 にチェックを入れて、 インターフェイスサービスのタイプ を Adapter に設定します。
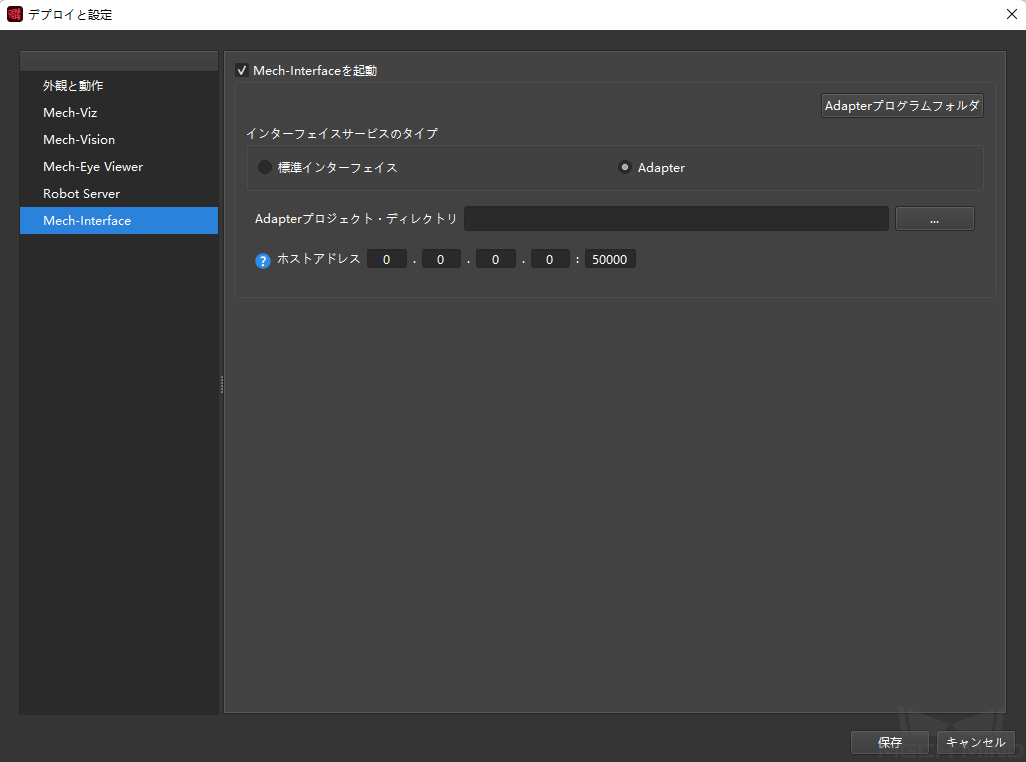
Adapterプロジェクト・ディレクトリ を、Adapterプログラムが保存されているディレクトリに設定します。
実際の状況に応じて ホストアドレス を設定します。ポートがピア(相手側)と一致する必要があります。
ピア(相手側)がサーバーの場合、 ホストアドレス は相手側のIPアドレスに設定する必要があります。
ピア(相手側)がクライアントの場合、 ホストアドレス は「0.0.0.0」に設定する必要があります。
保存 をクリックしその画面を閉じます。その後、Mech-Centerソフトウェアを再起動します。
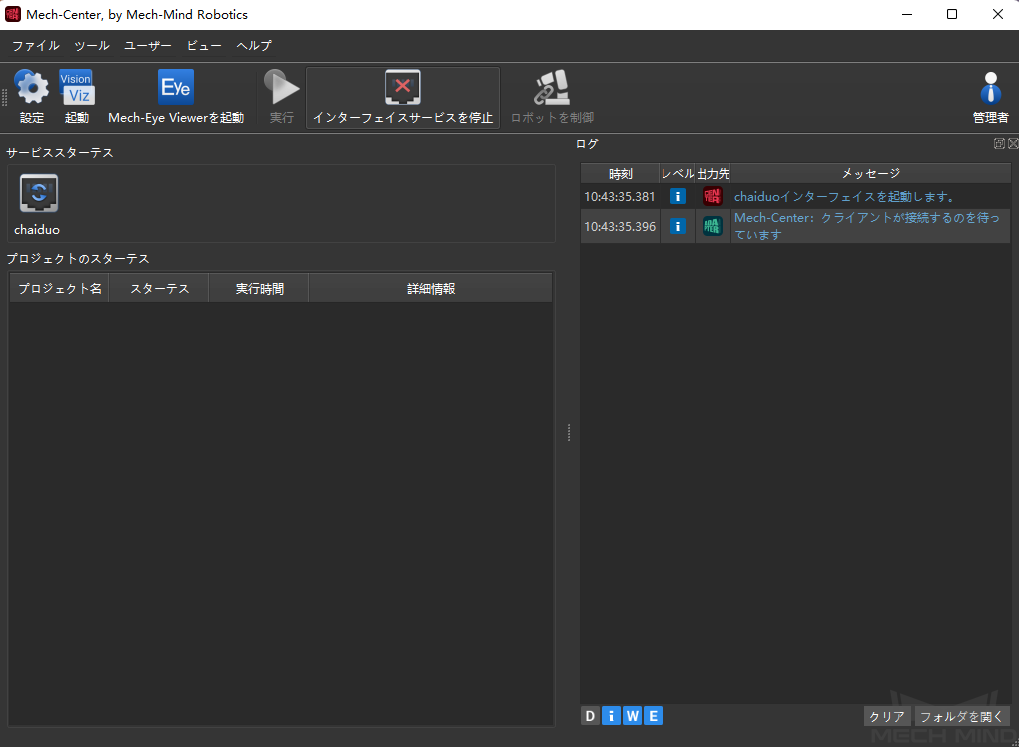
ツールバーの インターフェイスサービスを起動 をクリックしてAdapterサービスを起動します。
下図に示すように、 インターフェイスサービスを起動 が インターフェイスサービスを停止 になって、サービスステータス内に起動されたAdapterプロジェクトが表示されるとAdapterサービスが起動されている状態になります。
Adapterを簡単に理解したら、 Adapterジェネレーターのマニュアル を参照して、最初のAdapterプロジェクトをすばやく生成できます。