Save and Load Vision Records¶
The saved vision records can be used to reproduce the bugs in the simulated project or in real project on site.
Vision records enables to run a Mech-Viz project without running the corresponding Mech-Vision project. When an error occurs, the Vision records, Mech-Viz project file, plan history, log, and other test data can be sent to the developers who are not on site, and then they can track and fix the bugs based on the data received.
This section covers the following instructions.
Save Vision Records¶
Go to the menu bar and then select to open the Set Vision Records window.
Save poses only¶

After running the project, the poses will be stored in vision_records\Mech-Vision project name\running date of the project in the installtion directory of Mech-Viz, as shown below.
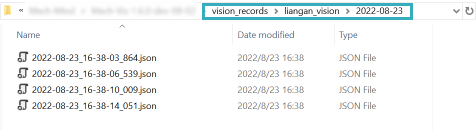
Figure 1 poses¶
Save poses and point clouds¶

After running the project, the poses and point clouds will be stored in vision_records\Mech-Vision project name\running date of the project in the installtion directory of Mech-Viz, as shown below.
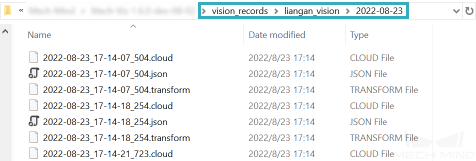
Figure 2 poses and point clouds¶
In a scenario where point clouds are required, the point cloud file will be saved every time an image was captured. The size of the point cloud files are large and they will take up memory. Therefore, it is recommended to check Pcl during testing, and uncheck it after the project starts to run stably.
Attention
Besides the vision_records folder, please save the corresponding Mech-Viz project as well to utilize the vision records and reproduce the bug.
Load Vision Records¶
Use the saved vision records¶
Open the Mech-Viz project which encountered an error and the vision records have been saved.
Make sure that the Mech-Vision project is not registered in Mech-Center, or else the Mech-Vision project will be utilized instead of the vision records.
Save the vision records in the vision_records folder in the installation directory of Mech-Viz.
Hint
You can go to to locate the installation directory quickly.
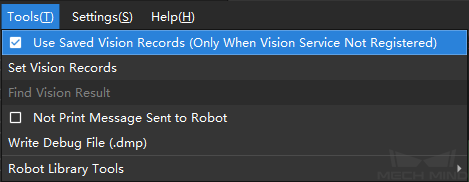
Click on Tools and check Use Saved Vision Records (Only When Vision Service Not Registered).
Click on Simulate or Run in the toolbar. Mech-Viz will check whether there is any saved vision records in the vision_records folder, and a Set Vision Records window will pop up.
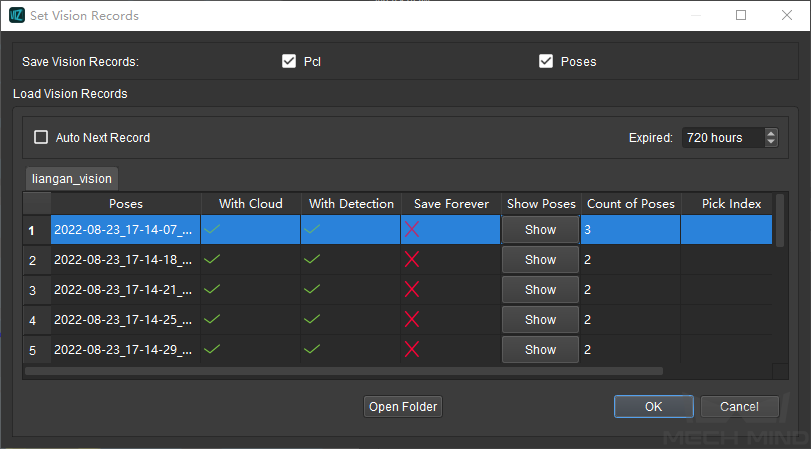
The figure below shows the window when the vision records contain poses only.
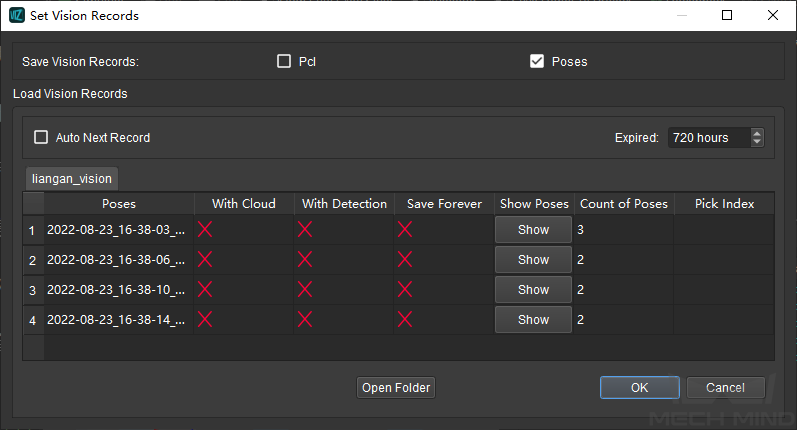
The vision records correspond to the data in Figure 1.
The figure below shows the window when the vision records contain poses and point clouds.
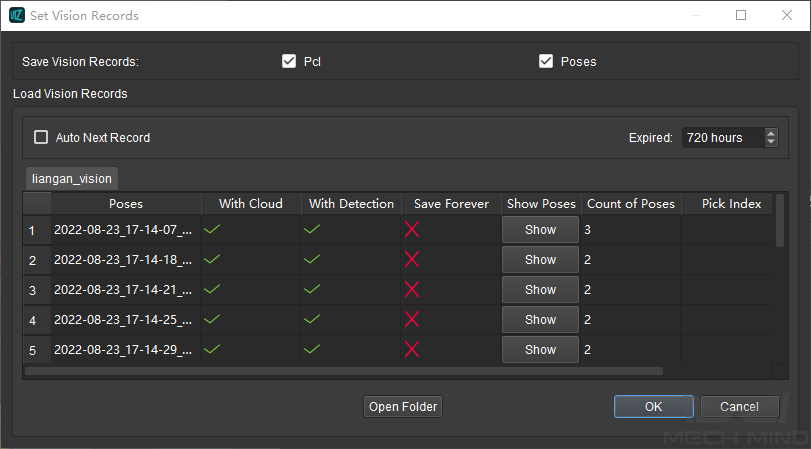
The vision records correspond to the data in Figure 2.
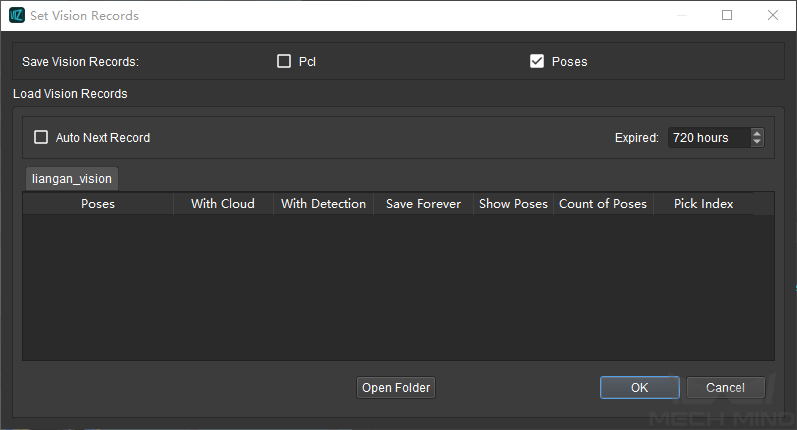
The figure below shows the window when there is no available vision records.
Select the vision record you would like to use and click on OK , Mech-Viz will reproduce the condition based on the current record.
Attention
After using vision records to reproduce the condition, please make sure to UNCHECK Use Saved Vision Records (Only When Vision Service Not Registered) to avoid errors.
Tips¶
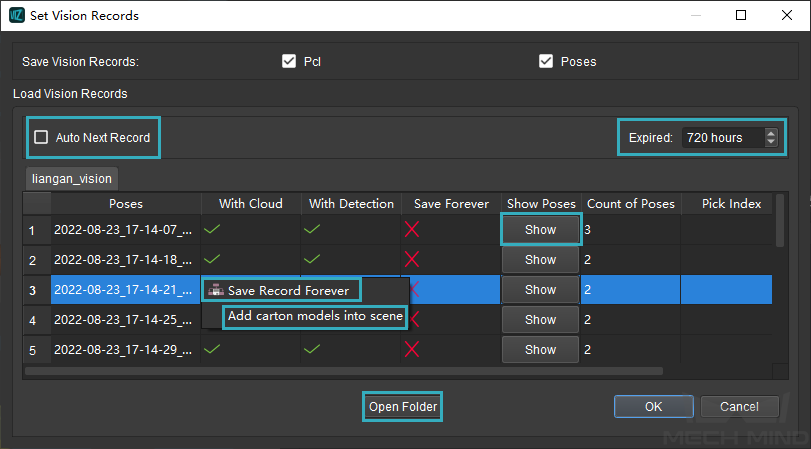
Auto Next Record |
If this option is not checked, the selected vision record will be used repeatedly. If this option is checked, the vision records will be automatically used one after another from the selected vision record, and the project will be stopped when the last vision record is used. |
Expired |
The saved vision records will be deleted after the expiration time. |
Open Folder |
Click to open the vision_records folder in the installation directory. |
Display |
Click on Show to display the pose of this record in the 3D simulation area. |
Right click on any one of the vision records, two options will be displayed in the context menu. |
|
Save Record Forever |
After selecting this option, the selected vision record will be saved forever and will not be affected by the expiration time. |
Add carton models into scene |
Click to load and display the carton models in the scene. |