Transform Poses¶
Function¶
This Step can transform poses from one reference frame to another, or transform within its own reference frame according to the reference pose.
Sample Scenario¶
This Step is usually used to transform poses between camera reference frame and robot reference frame.
Input and Output¶
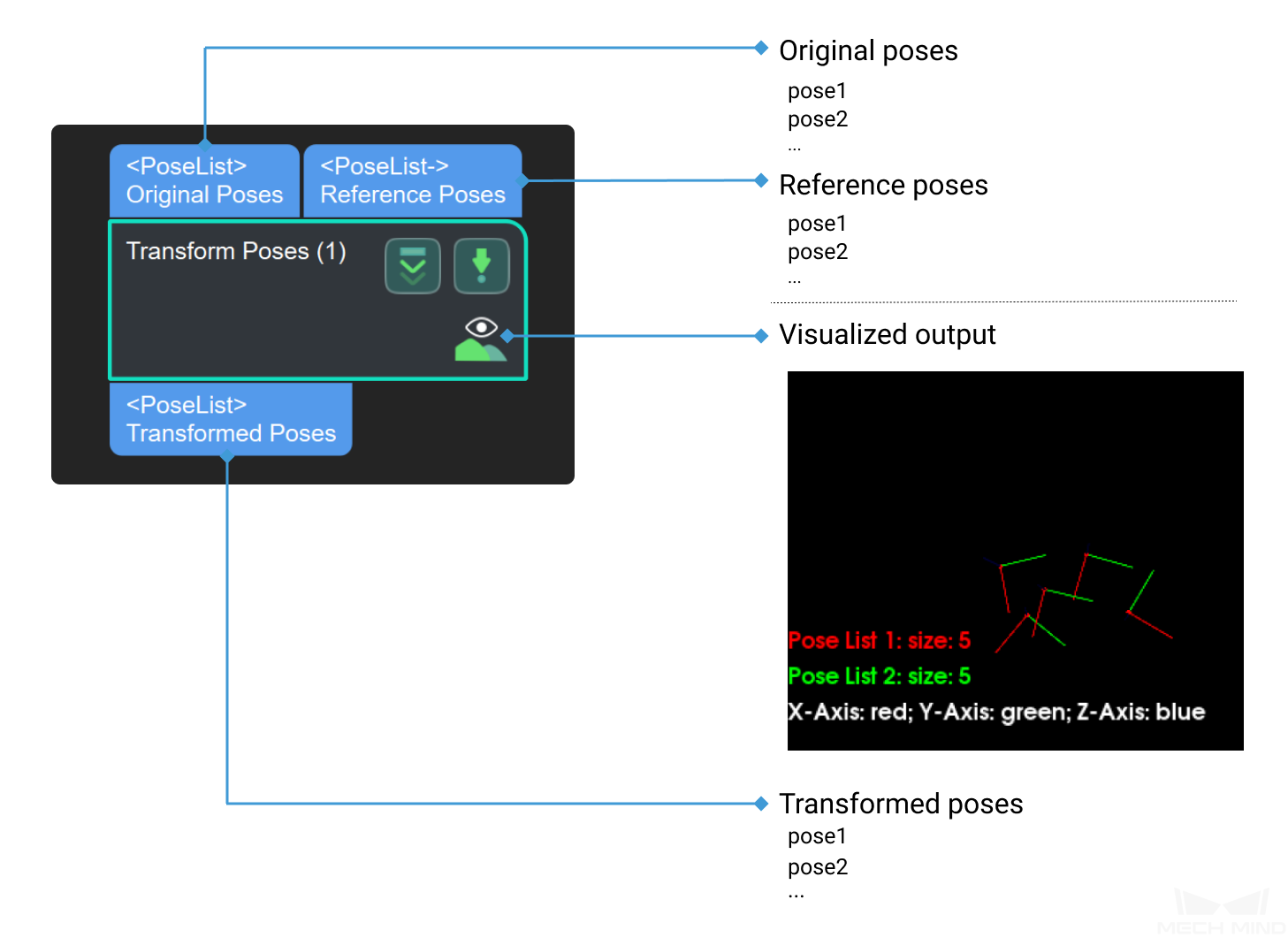
Parameter Descriptions¶
Parameter |
Description |
||
Visualization Settings |
Show Cloud Under Chosen Coordinate |
Robot Coordinate |
Display point clouds in the robot reference frame (default setting) |
Camera Coordinate |
Display point clouds in the camera reference frame |
||
Pose Visuals Setting |
After |
Display the output transformed poses (default settings) |
|
Before |
Display the input original poses |
||
All |
Display both the input and output poses |
||
Transformation Settings |
Transformation Type |
CameraToRobot |
Transform the poses from camera reference frame to robot reference frame |
RobotToCamera |
Transform the poses from robot reference frame to camera reference frame |
||
AllWithFirst |
Transform the original poses to another reference frame according to the first reference pose input |
||
FirstWithAll |
Transform the first original pose input to another reference frame according to reference poses |
||
UseCorrespondenceInput |
Transform the original poses to another reference frame according to the corresponding reference poses respectively |
||
Parameter Tuning¶
Visualization Settings
- Show Cloud Under Chosen Coordinate
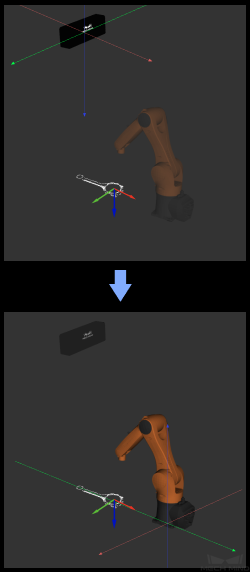
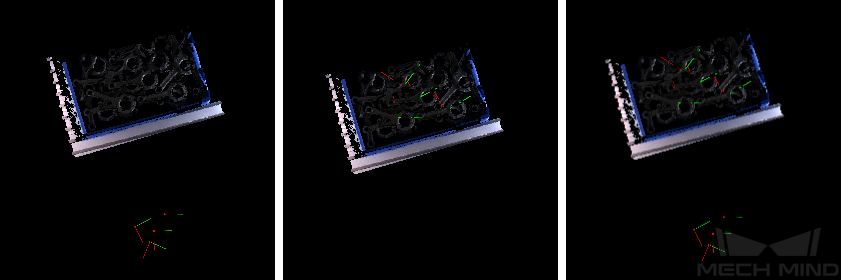
- Default setting: Robot CoordinateOptions: Robot Coordinate, Camera CoordinateDescription: When Camera Coordinate is selected, point clouds in the camera reference frame will be displayed in the debug output window, as shown below on the left. When Robot Coordinate is selected, point clouds in the robot reference frame will be displayed in the debug output window, as shown below on the right.
Tip
When Robot Coordinate is selected, the debug output window will seem to be all black at first, and you will need to adjust the perspective in the window to view the point cloud and reference frame.
When Camera Coordinate is selected, only the point cloud can be viewed in the debug output window at first, and you will need to adjust the perspective in the window to view the reference frame.
- Pose Visuals Setting
- Default setting: AfterOptions: After, Before, AllDescription: The Camera Coordinate is selected in the following example. The figure below shows the visualized outputs when After, Before, and All are selected respectively.
Transformation Settings
- Transformation Type
- Default setting: CameraToRobotOptions: CameraToRobot, RobotToCamera, AllWithFirst, FirstWithAll, UseCorrespondenceInputDescriptions:
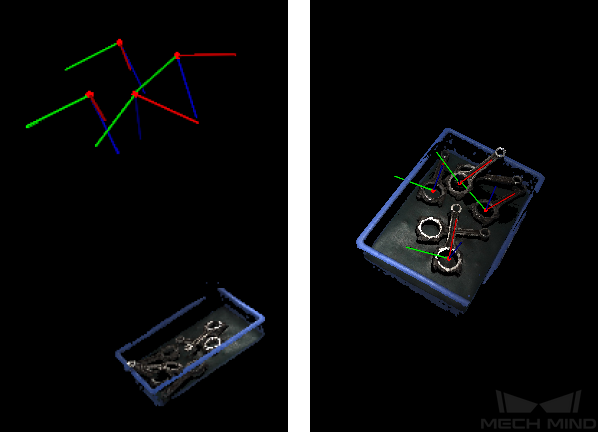
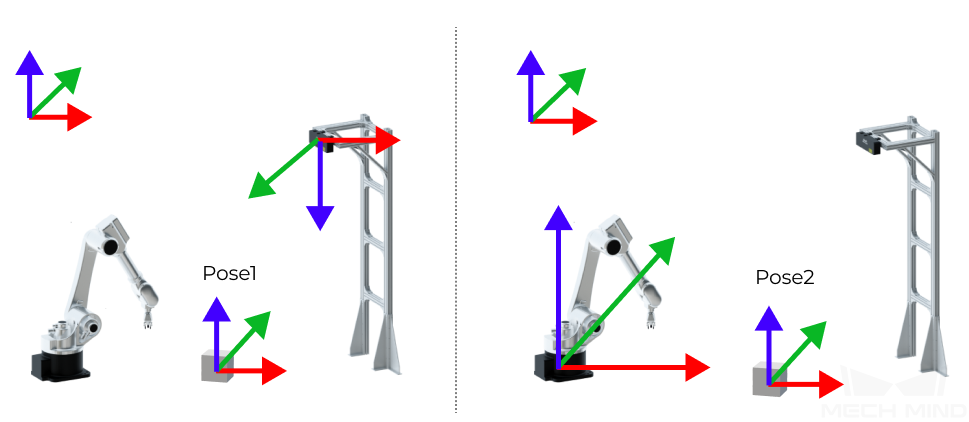
CameraToRobot: Pose1 is the original object pose in the camera reference frame. When the transformation type is selected as CameraToRobot, Pose2 in the robot reference frame will be output. The transformation result is shown in the figure below (before transformation on the left and after transformation on the right).
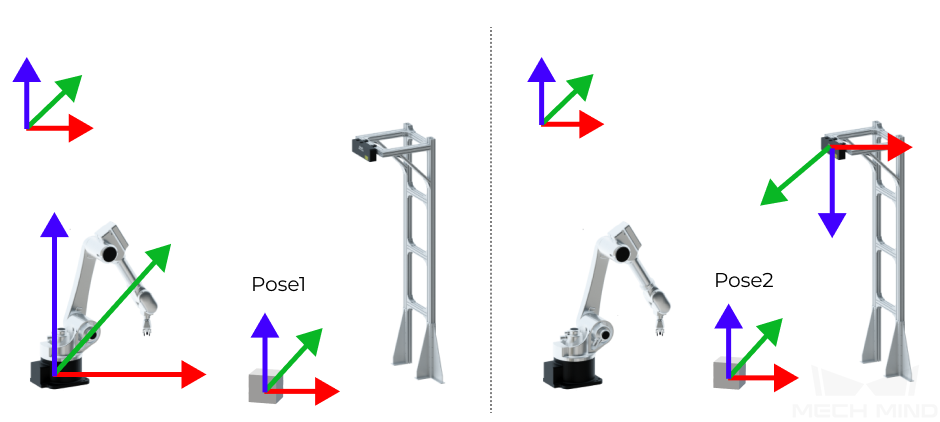
RobotToCamera: Pose1 is the original object pose in the robot reference frame. When the transformation type is selected as RobotToCamera, Pose2 in the camera reference frame will be output. The transformation result is shown in the figure below (before transformation on the left and after transformation on the right).
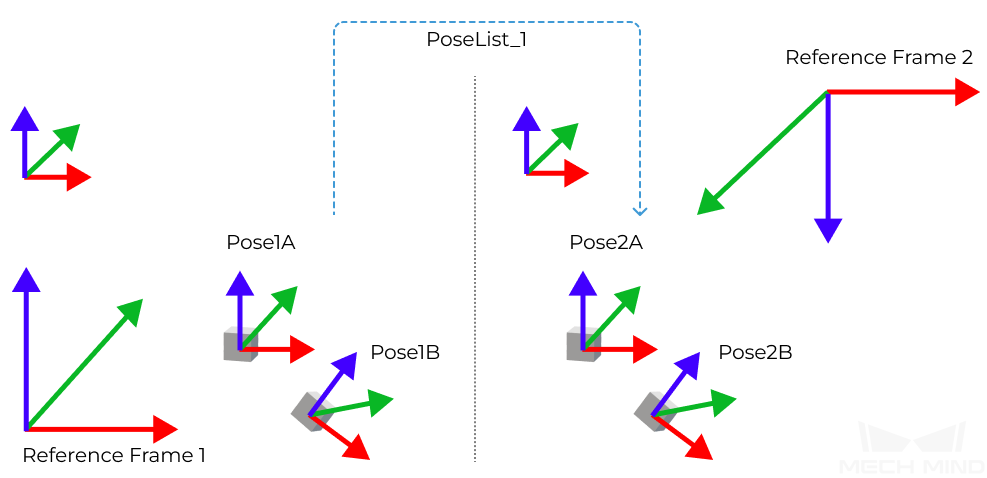
AllWithFirst: The poses of objects A and B are denoted as Pose1A and Pose1B respectively in the reference frame 1. When the transformation type is selected as AllWithFirst and a reference pose list has been input, the transformed poses of object A and B, Pose2A and Pose2B, in the reference frame 2 will be output. The first reference pose in the pose list is used in the transformation of all original poses. The transformation result is shown in the figure below (before transformation on the left and after transformation on the right).
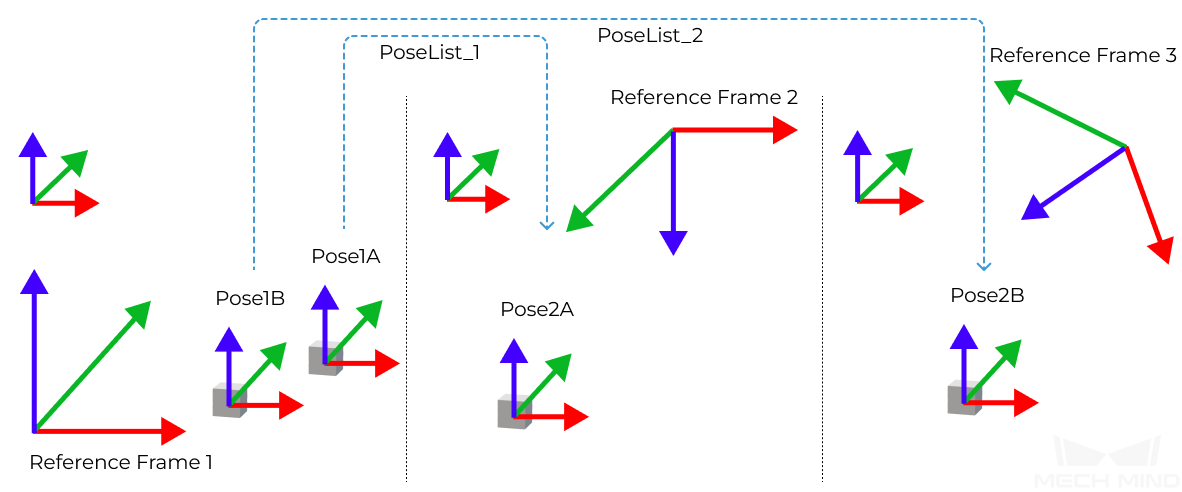
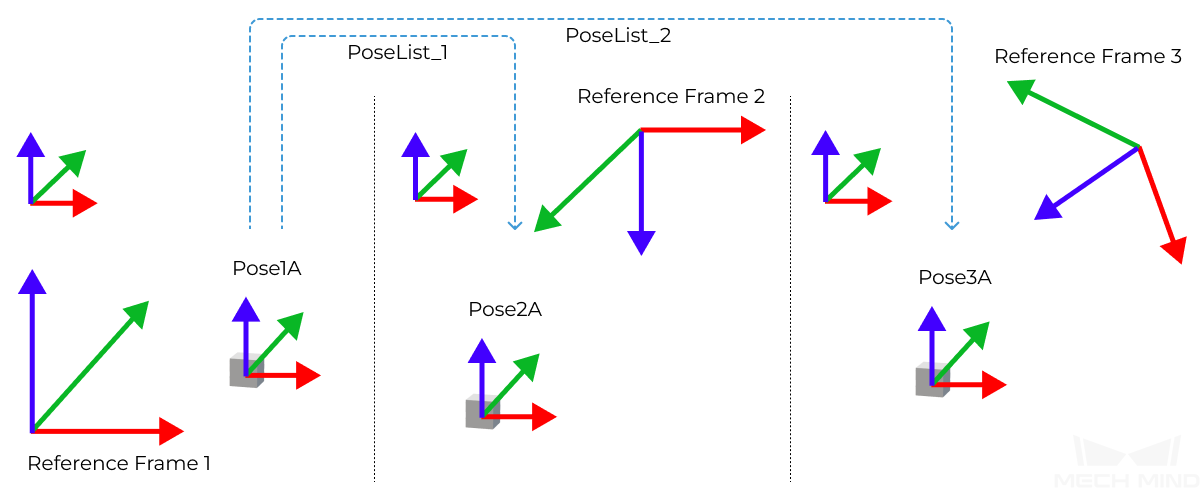
FirstWithAll: The poses of objects A and B are denoted as Pose1A and Pose1B respectively in the reference frame 1. When the transformation type is selected as FirstWithAll and reference pose lists have been input, the transformed poses of object A, Pose2A and Pose3A, in the reference frame 2 and reference frame 3 respectively will be output. All reference poses in the pose lists are used in the transformation of the first original pose, which is Pose1A in this example. The transformation result is shown in the figure below.
UseCorrespondenceInput: The poses of objects A and B are denoted as Pose1A and Pose1B respectively in the reference frame 1. When the transformation type is selected as UseCorrespondenceInput and reference pose lists have been input, the transformed poses of object A and B, Pose2A and Pose3B, in the reference frame 2 and reference frame 3 respectively will be output. The reference poses in the pose list are used in the transformation of each original pose correspondingly. The transformation result is shown in the figure below.