Map to Multiple Pick Points¶
Function
Calculate other pick points of objects through object geometric center points and their mapping relationships with the multiple pick points.
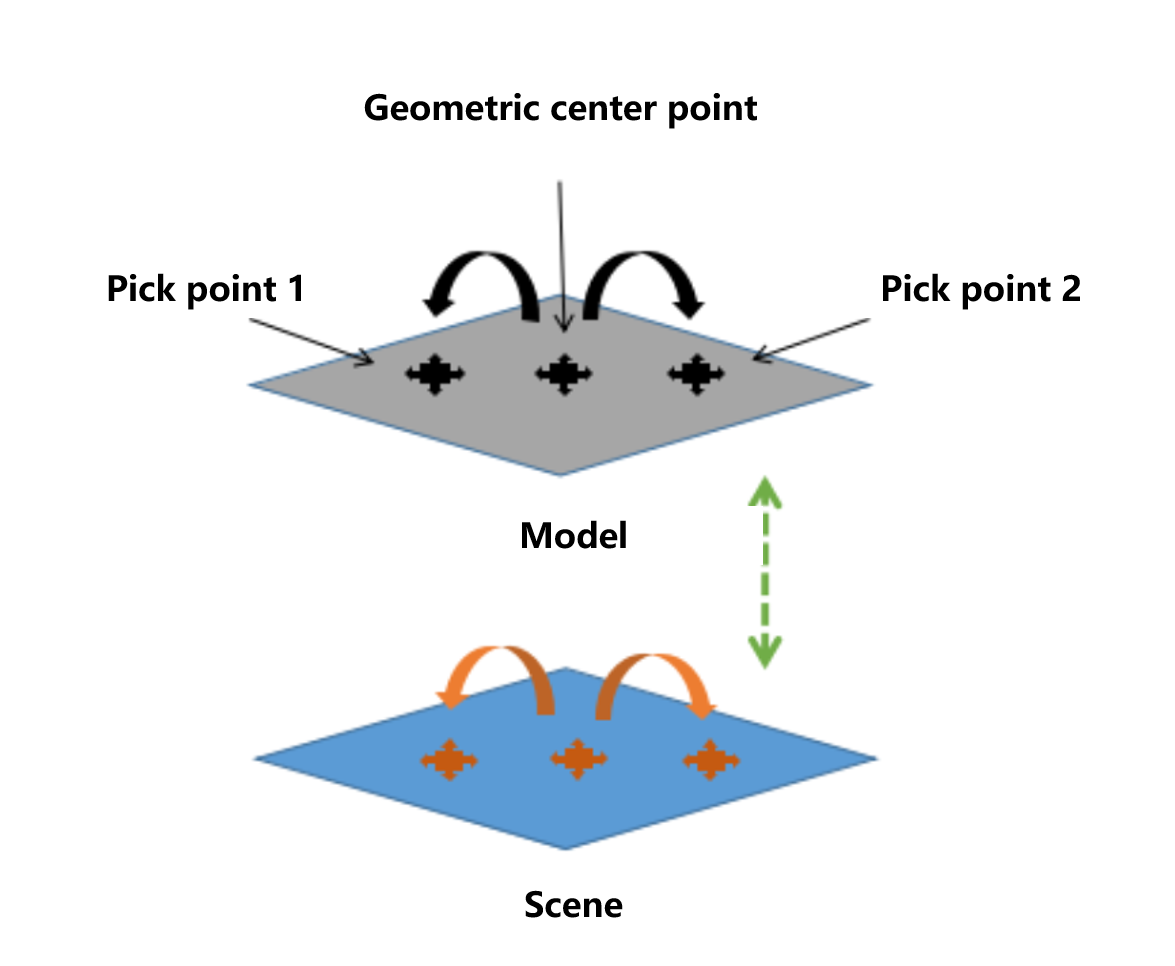
Schematic diagram of mapping to multiple pick points¶
Sample Scenario
This Step is required if the objects’ pick points do not coincide with their geometric center points, or if there is more than one pick point on each object.
Please follow the fixed usage instructions to add multiple pick points to a scene object to send to the robot control software.
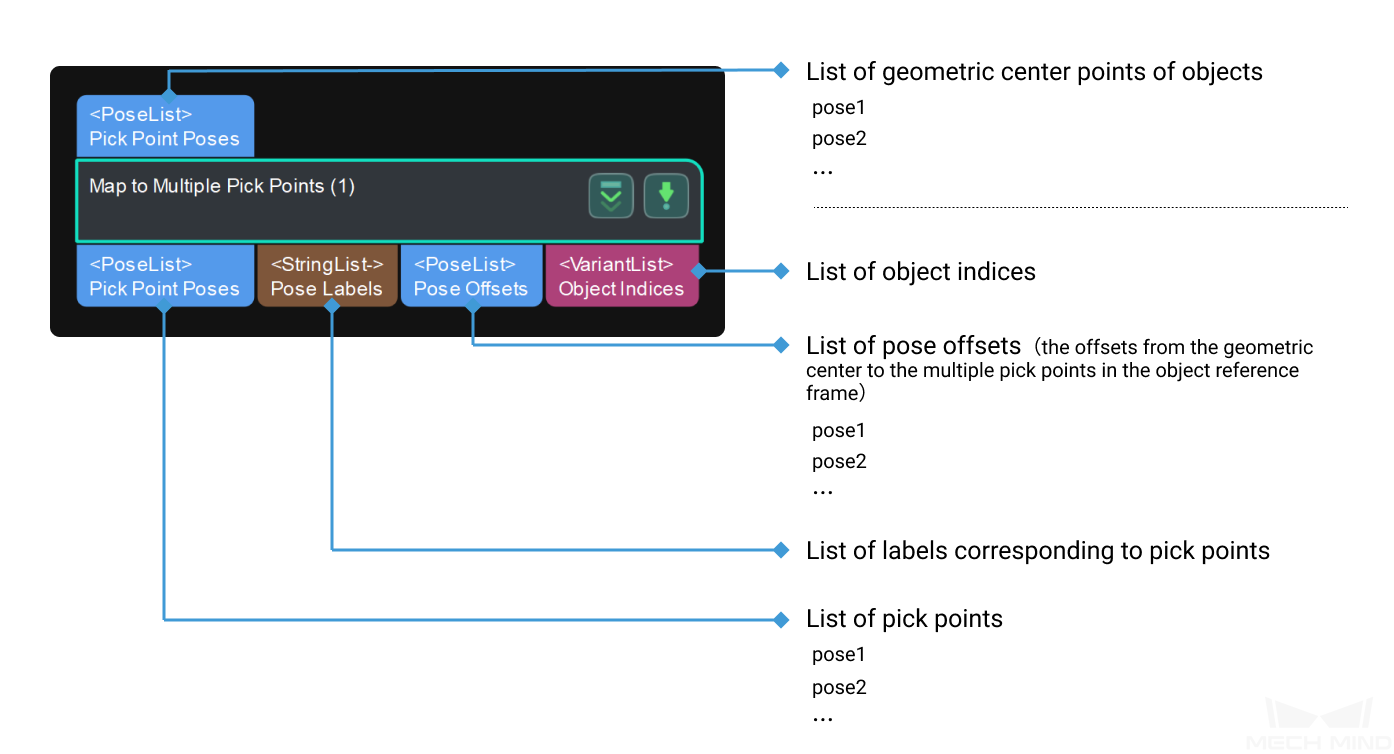
The Pick Point output port of this Step needs to be connected to the Reference Poses input port of the Transform Poses Step.
The Pose Offsets output port of this Step needs to be connected to the Original Poses input port of the Transform Poses Step.
Input and Output
Parameters
geoCenterPointPath
The pose of the object’s geometric center point on the template.
Instruction: Absolute path or relative path of the geometric center point file.ObjPlacePointPath
Pose of object placement point.
Instruction: The absolute path or relative path of object placement point file.pickpointsPath
The pose of the object’s pick point on the template.
Instruction: The absolute or relative path of the pick point file.labelFilePath
It has labels corresponding to the pick point.
Instruction: Absolute path or relative path of label file.