Translate Poses along Given Direction¶
Sample Scenario¶
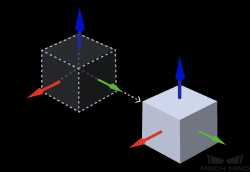
Translate poses according to the direction and distance set by the user.
Input and Output¶
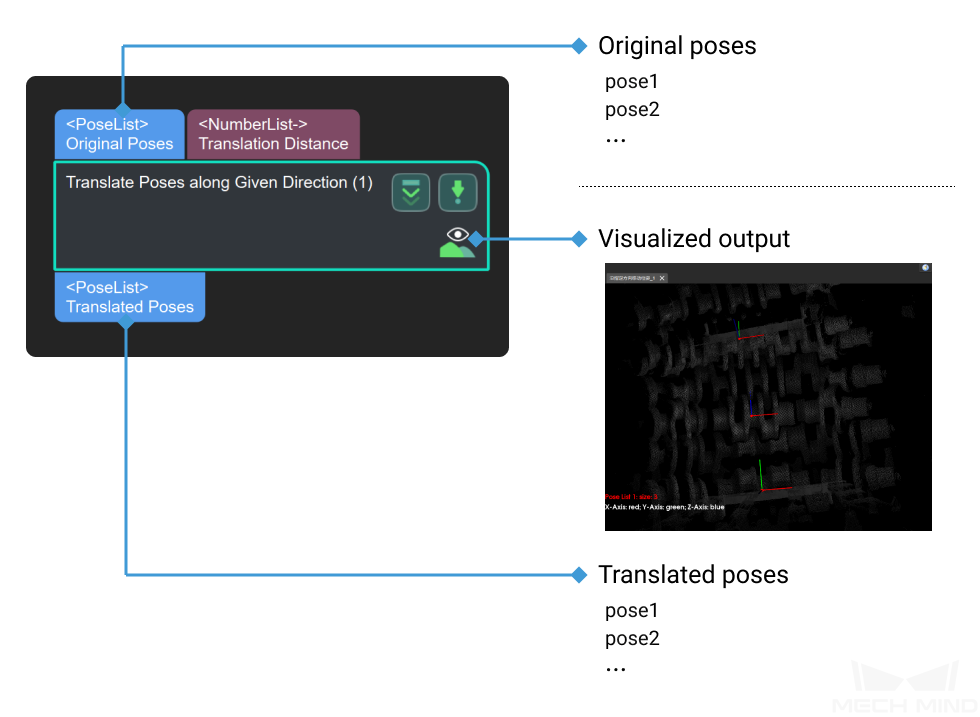
Parameter Descriptions¶
Parameter |
Description |
||
Visualization Settings |
Show Cloud Under Chosen Coordinate |
Robot Coordinate |
Display point clouds in the robot reference frame |
Camera Coordinate |
Display point clouds in the camera reference frame |
||
Pose Visuals Setting |
After |
Display the output translated poses |
|
Before |
Display the input original poses |
||
All |
Display both the input and output poses |
||
Translation Direction Settings |
Translation Distance |
The translation distance along the customized direction |
|
Translation Direction Source |
CustomizedDirection |
Translate the pose along a customized direction |
|
ObjectAxis |
Translate the pose along a specified axis of the object reference frame |
||
Customized Direction |
X |
X value of the reference direction |
|
Y |
Y value of the reference direction |
||
Z |
Z value of the reference direction |
||
Parameter Tuning¶
Visualization Settings
- Show Cloud Under Chosen Coordinate
- Default setting: Robot CoordinateOptions: Robot Coordinate, Camera CoordinateInstruction: Please refer to Display point clouds in a specified reference frame for detailed instructions.
- Pose Visuals Setting
- Default setting: AfterOptions: After, Before, All
Translation Direction Settings
- Translation Distance
- Default setting: 0Instruction: Please configure according to actual situation.
- Translation Direction Source
- Default setting: CustomizedDirectionOptions: CustomizedDirection, ObjectAxisInstruction: Please configure according to actual situation.
Hint
When ObjectAxis is selcted, you will need to select an axis according to the actual situation.

CustomizedDirection (This option will only appear when CustomizedDirection is selected.)
- X
- Default setting: 0
- Y
- Default setting: 0
- Z
- Default setting: 1
Examples
The figure below shows the pose before and after being translated 0.03m along the X axis of the object reference frame. In this example, ObjectAxis is selected as the Translation Direction Source; the specified axis is the X axis; and the Translation Distance is set to 0.03.
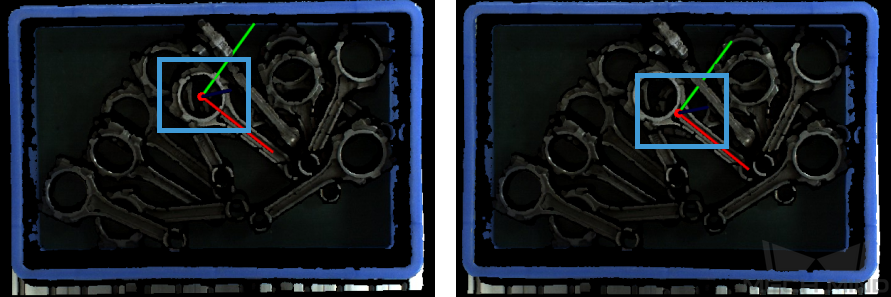
The figure below shows the pose before and after being translated 0.03m along the Y axis of the object reference frame. In this example, ObjectAxis is selected as the Translation Direction Source; the specified axis is the Y axis; and the Translation Distance is set to 0.03.

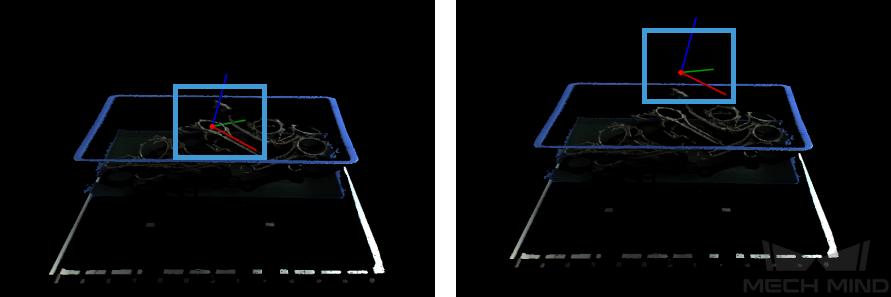
The figure below shows the pose before and after being translated 0.08m along the Z axis of the object reference frame. In this example, ObjectAxis is selected as the Translation Direction Source; the specified axis is the Z axis; and the Translation Distance is set to 0.08.
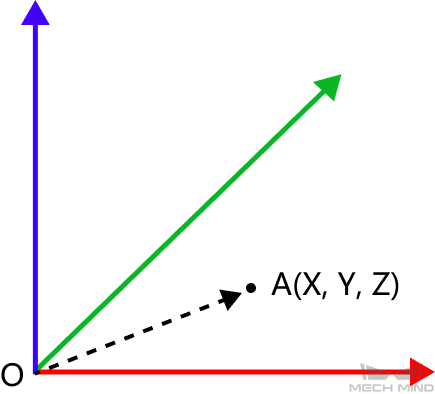
When CustomizedDirection is selected as the Translation Direction Source, you will need to set the values of X, Y, and Z in Customized Direction. As shown in the figure below, the path from the origin O to A (X, Y, Z) is the direction for the pose translation.
The figure below shows the pose before and after being translated 0.08m along the customized direction. In this example, the values of X, Y, and Z are all set as 5, and the Translation Distance is set to 0.08.
