충돌 모델 구성¶
Mech-Viz에서 충돌 감지를 받는 모델 유형은 로봇 관절, 시나리오 물체, 엔드 이펙터(표면), 포인트 클라우드, 감지된 비 직육면체, 피킹된 비 직육면체 그리고 배치된 비 직육면체 등 있습니다. 유형이 다른 충돌 모델에 대한 감지의 계산 과정과 방식도 다릅니다. 충돌 모델 유형에 관한 자세한 정보는 충돌 모델 유형 를 참고하세요.
각종의 충돌 모델의 구성 방식이 서로 다릅니다. 구체적인 구성 방식은 다음과 같습니다:
로봇 관절: 로봇 에서 대응하는 로봇 브랜드 및 모델 번호를 선택하여 로봇 모델을 추가할 수 있습니다. 그림1과 같습니다.

그림1 로봇 관절 모델 구성¶
시나리오 물체: 시나리오 에서 새로운 모델 을 클릭하여 물체 유형에 따라 직육면체 혹은 정사각형 바구니 등 모델을 새로 만들 수 있으며 모델을 로드하기 를 클릭하여 기존의 시나리오 모델(STL、OBJ、DAE 등 형식 모두 가능함)을 로드할 수도 있습니다. 그림2와 같습니다.
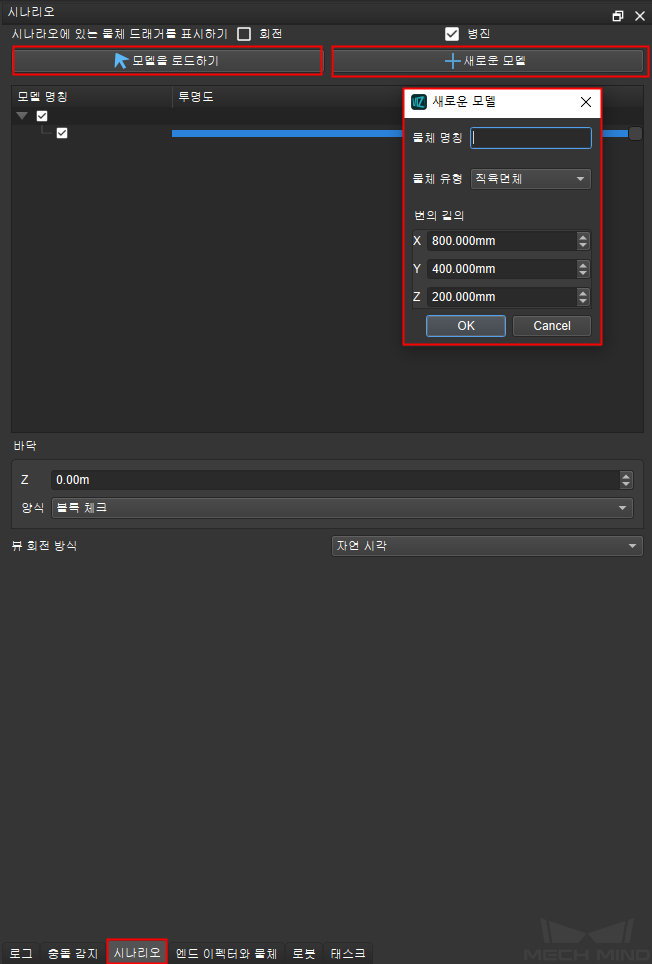
그림2 시나리오 물체 모델 구성¶
주의
로드된 모델은 부가 파라미터의 총돌을 감지할 필요가 있습니다 를 선택해야 실제로 충돌 감지 태스크로 추가될 수 있습니다. 그렇지 않으면 표시 모델만으로 나타날 것입니다.
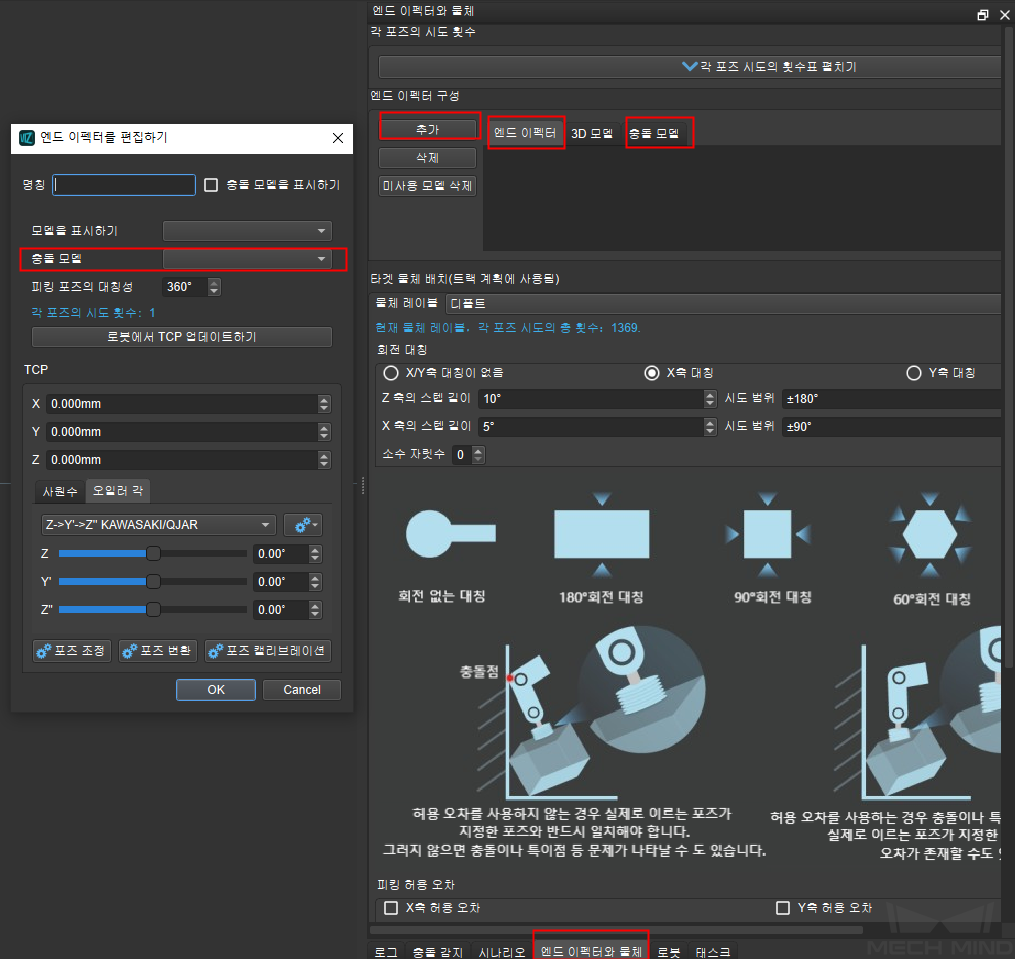
엔드 이펙터: 엔드 이펙터와 물체 에서 충돌 모델을 선택하고 왼쪽에 있는 추가 를 클릭하여 원하는 모델을 추가하세요. 하지만 이때 충돌 모델이 실제 효과를 발휘하지 않았습니다. 아래의 그림과 같이 엔드 이펙터에서 해당 충돌 모델을 선택해야 합니다.
팁
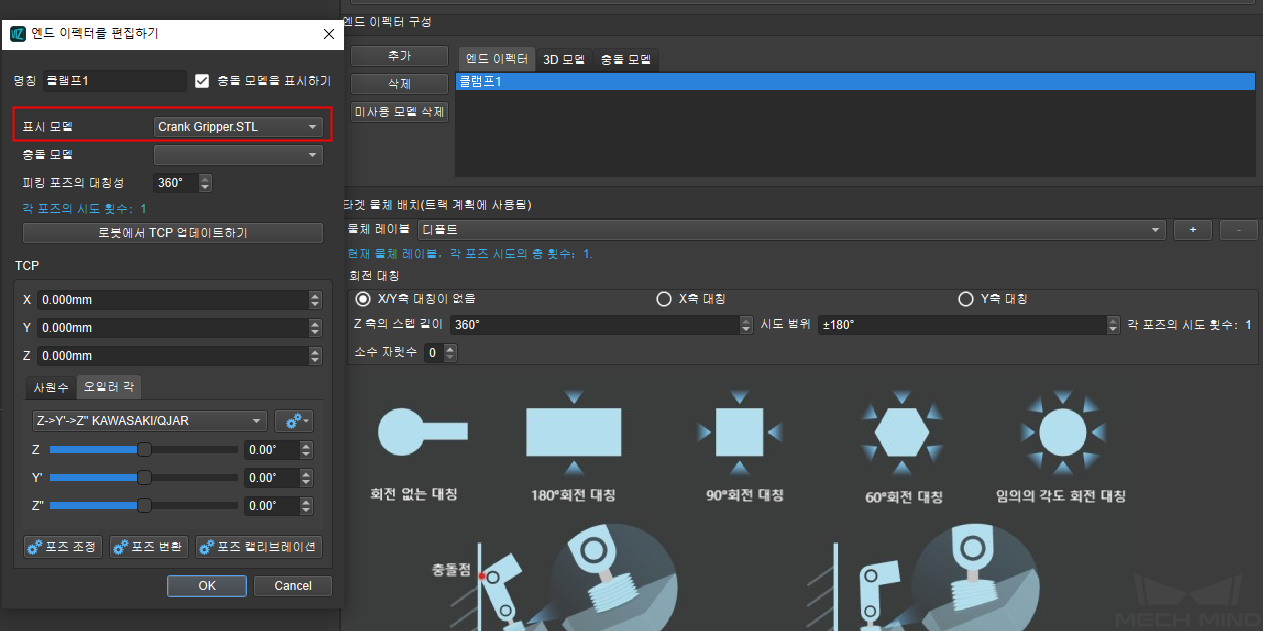
표시 모델만 있는 경우에 기본적으로 경계 박스(기본 기학체 유형)를 충돌 모델로 사용하여 충돌 감지를 실행합니다. 경계 박스 충돌 모델을 관찰하려면 엔드 이펙터에서 표시 모델을 도입한 뒤 충돌 모델을 표기하기 를 선택해야 합니다. 아래의 그림과 같습니다.
포인트 클라우드:대부분 포인트 클라우드 모델은 프로젝트에서 처리해야 할 물체인데 Mech-Vision에서 发送点云到外部服务 스텝을 통해 도입해야 합니다.
감지된 물체:충돌을 감지할 필요가 있는 물체의 STL모델과 binvox모델을 프로젝트의 collision_models 폴더에 추가해야 합니다. 다음으로 아래의 그림과 같이 Mech-Vision에서 发送点云到外部服务 스텝을 사용하고 파라미터 설정에 있는 물체 정보를 보내기 (물체 포즈,레이블과 포인트 클라우드 등)를 Ture로 설정하여 도입해야 합니다. binvox 모델의 전환 방법은 binvox 충돌 모델 를 참고하세요.

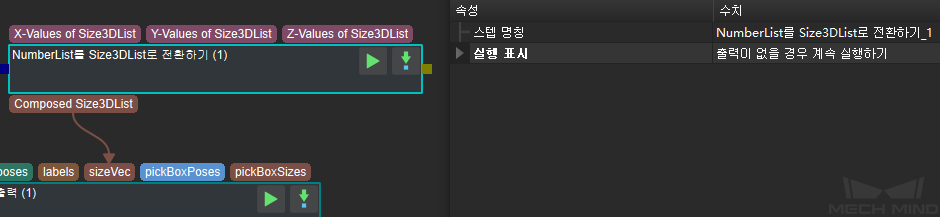
피킹된 물체:주로 직육면체와 비직육면체로 나눠집니다. 비직육면체 모델의 구성 방식은 감지된 물체의 모델과 같고 직육면체 모델을 구성할 때 Mech-Vision에서 “NumberList를 Size3DList로 전환하기” 스텝을 통해 물체의 사이즈를 계산하여 “출력” 스텝으로 입력해야 합니다. 그 다음에 “출력” 스텝에서 Size3DList(물체의 사이즈)를 Mech-Viz로 보내고 Mech-Viz가 자동으로 해당하는 충돌 모델을 생성할 것입니다. 아래의 그림과 같습니다.
배치된 물체: 대부분 경우에는 구성할 필요가 없으며 피킹된 물체 모델 혹은 감지된 물체 모델에 따라 구성된 것입니다. 이러한 모델의 충돌 감지는 시나리오 충돌 감지입니다.