Software and Hardware¶
Hardware Structure¶
In the actual application of Mech-Mind products, it is necessary to implement functions based on a complete system. Generally, a system will include three main modules: Robot module, Camera module and Computer module. Ethernet connection is recommended for the communication within three modules.
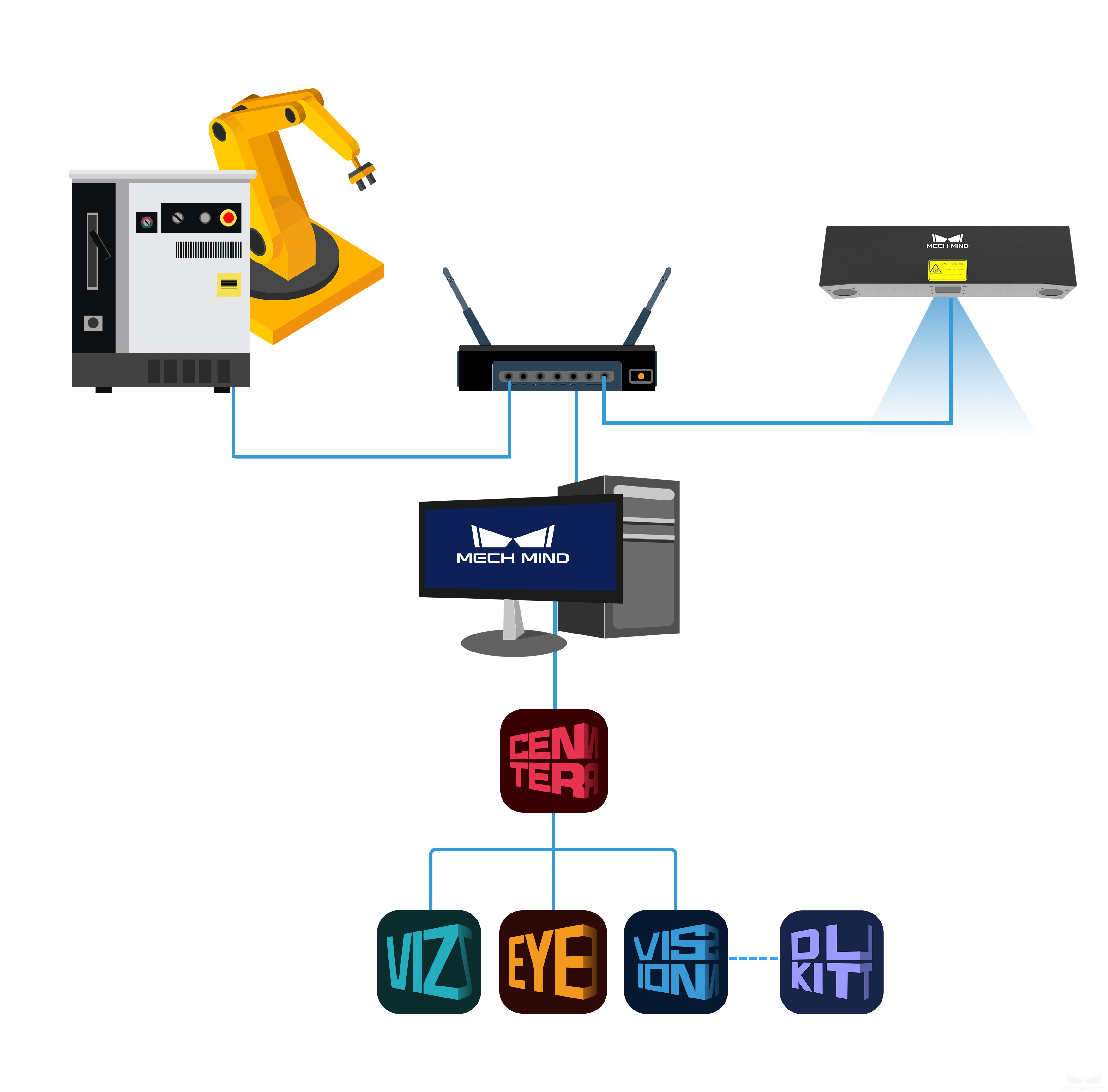
Figure 1 Structure for hardware system¶
Software Structure¶
The Mech-Mind Software Suite includes the following two control mechanisms.
Master control
Many robots can be completely controlled by Mech-Mind Software Suite, in this case the Software Suite is the master station and the robot is the slave station. Mech-Viz can achieve full control and dynamic simulation on the robot, and has a variety of practical functions such as motion planning, collision inspection, singularity avoidance, etc.
This system construction form is widely used in scenarios where the robot process is relatively simple and the process is short.
Robot or host computer master control
For the complex systems which the robot’s process is more complicated, considering the convenience of later maintenance, a robot or host computer can also be used as the master, and Mech-Mind Software Suite can be used as a slave station, which only sends vision pose or simple route. The host system triggers the camera to shoot at the right time. Mech-Mind Software Suite processes the image and sends the result back to the host computer for temporary storage. The host computer can directly call it when the vision result is required.
In this system construction form, it is usually necessary to use a separately written adapter to convert and relay signals. For robots that have not been adapted, that is, Mech-Mind Software Suite has not yet achieved full control on the robot, it can send vision pose.
In Mech-Mind system, Mech-Mind independently developed Mech-Center, Mech-Eye Viewer, Mech-Vision and Mech-Viz. For detailed introduction, please refer to Brief Introduction to Mech-Mind Software Suite .