工件抓取裕度¶
本文介绍工件的抓取裕度。
简介¶
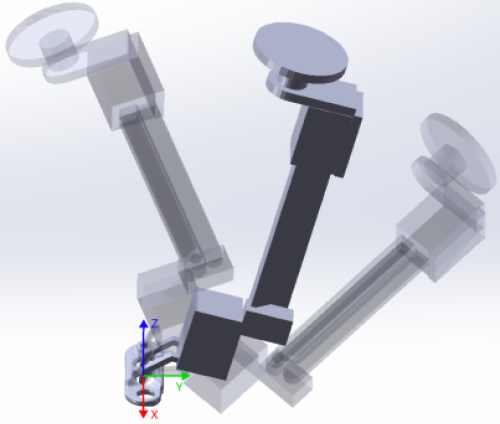
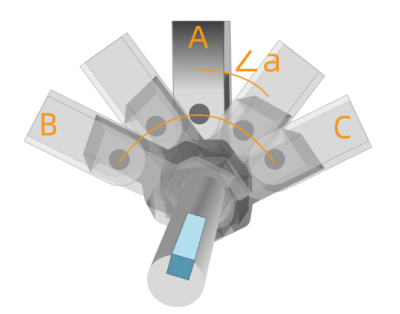
部分工件在被抓取时,机器人的抓取姿态可以在一定角度范围内灵活调整,该角度范围即抓取裕度。 通过设置抓取裕度,机器人可以主动利用这样的“可容许偏差”来避免碰撞、奇异点等问题。
如果放置位姿设置为“工件位姿”,在应用了抓取裕度进行抓取时, 软件自动记录了抓取时的实际抓取姿态与放置姿态间的夹角。 放置时,软件将根据该夹角调整工具姿态,确保工具按照正确的放置姿态将物体放下。

本文介绍工件的抓取裕度。
部分工件在被抓取时,机器人的抓取姿态可以在一定角度范围内灵活调整,该角度范围即抓取裕度。 通过设置抓取裕度,机器人可以主动利用这样的“可容许偏差”来避免碰撞、奇异点等问题。
如果放置位姿设置为“工件位姿”,在应用了抓取裕度进行抓取时, 软件自动记录了抓取时的实际抓取姿态与放置姿态间的夹角。 放置时,软件将根据该夹角调整工具姿态,确保工具按照正确的放置姿态将物体放下。