拆垛吸盘(多抓)¶
工具类型为拆垛吸盘(多抓)时可调节以下参数。
组合箱子/组合方式¶
多拆模式下,为了一次拆垛多个箱子,在进行拆垛规划前,软件会先尝试将多个相邻的箱子组合成箱子组。
软件共提供了三种组合策略:默认、沿箱子位姿坐标系组合、沿自定义坐标系组合。
沿箱子位姿坐标系组合¶
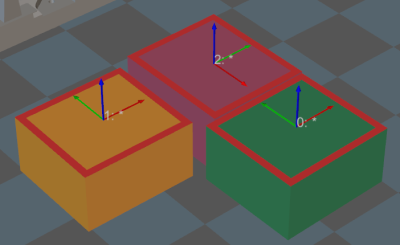
即以一个箱子作为起点,以这个箱子的坐标轴朝向为方向,寻找可以组合的其他箱子。
- 组合方向
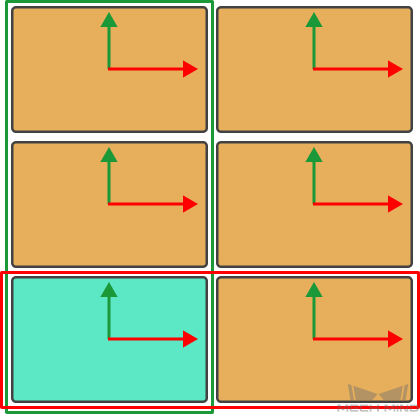
在选择左下角绿色箱子为起点的情况下,根据需要选择组合方向。如果选择了X轴(图中红色坐标轴),则可能的组合结果为图中红色框内的两个箱子。如果选择了Y轴(图中绿色坐标轴),则可能的组合结果为图中绿色框内的三个箱子。
- 组合行数上限
部分场景中需要一次抓取多行箱子,可以根据需要设置组合的最大行数。软件会尽可能组合箱子以达到设定的组合行数上限。
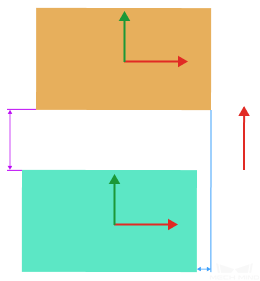
- 间距上限
在组合方向上相邻两个箱子之间的最大距离,下图紫色箭头范围。间距小于设定值时,两个箱子视为可以组合成箱子组。
- 偏出上限
在垂直组合方向上相邻两个箱子之间的最大偏出距离,图中蓝色箭头范围。间距小于设定值时,两个箱子视为可以组合成箱子组。
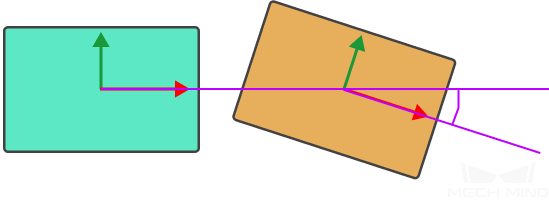
- 角度偏差上限
待组合的箱子相对于组合起始箱子的旋转角度。角度偏差小于设定值时,两个箱子视为可以组合成箱子组。
- 仅组合整行
为了防止实际上是一整行的箱子,因为视觉识别误差等因素被软件误判为两端有其他箱子,进而无法组合为整行。 通过设置 侵入容忍距离 参数,来过滤入侵的箱子。
- 侵入容忍距离
对于箱子组,如果有其他箱子在垂直于箱子组合方向上侵入,且侵入距离小于此阈值时,侵入的箱子视为误入,箱子组可视为一整行。 如果侵入距离大于此阈值则箱子组不能被视为一整行。侵入容忍距离参数值不能超过箱子边长值。
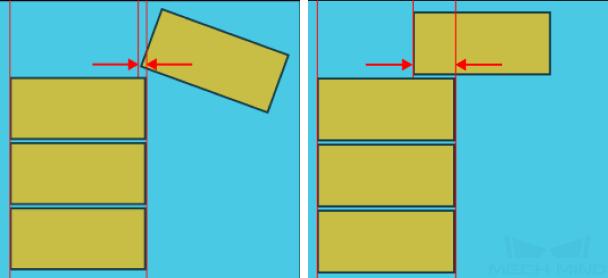
其他箱子侵入目标箱子组¶
沿自定义坐标系组合¶
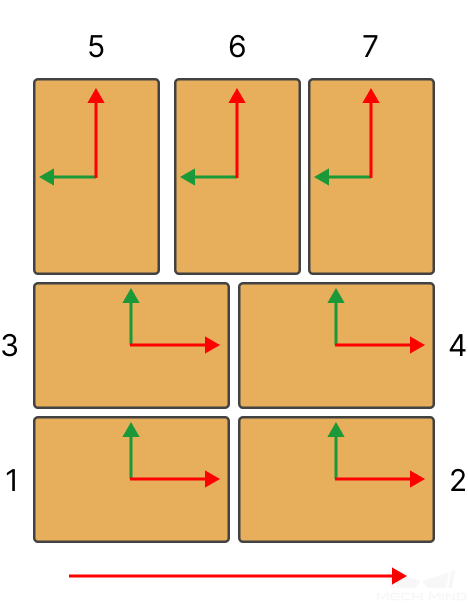
下图所示的 7 个箱子,如果沿着箱子坐标系组合:
沿箱子X轴组合得到的结果是:1 2、3 4、5,6,7。
沿箱子Y轴组合得到的结果是:1 3,2 4,5 6 7。
如果希望得到如下组合结果:1 2,3 4,5 6 7。则需要要求所有箱子沿着图片底部的红色箭头方向组合,该红色箭头我们称为自定义坐标轴。
- 自定义坐标系原点 X/Y/Z 坐标
调整自定义坐标系原点位置。
- 自定义坐标系旋转角度
调整自定义坐标系的朝向。
- 组合行数上限
部分场景中需要一次抓取多行箱子,可以根据需要设置组合的最大行数。软件会尽可能组合箱子以达到设定的组合行数上限。
- 箱子与坐标系夹角阈值
在尝试进行组合前,先检查箱子的坐标系与选定的自定义坐标系之间的夹角,如果箱子的两个坐标系夹角均大于设定值则该箱子不会参与箱子组合。
- 间距上限
在组合方向上相邻两个箱子之间的最大距离,下图紫色箭头范围。间距小于设定值时,两个箱子视为可以组合成箱子组。
- 偏出上限
在垂直组合方向上相邻两个箱子之间的最大偏出距离,图中蓝色箭头范围。间距小于设定值时,两个箱子视为可以组合成箱子组。
- 角度偏差上限
待组合的箱子相对于组合起始箱子的旋转角度。角度偏差小于设定值时,两个箱子视为可以组合成箱子组。
- 仅组合整行
为了防止实际上是一整行的箱子,因为视觉识别误差等因素被软件误判为两端有其他箱子,进而无法组合为整行。 通过设置 侵入容忍距离 参数,来过滤入侵的箱子。
- 侵入容忍距离
对于箱子组,如果有其他箱子在垂直于箱子组合方向上侵入,且侵入距离小于此阈值时,侵入的箱子视为误入,箱子组可视为一整行。 如果侵入距离大于此阈值则箱子组不能被视为一整行。
其他箱子侵入目标箱子组¶
吸盘配置/偏置方式¶
在吸盘箱子拆垛作业中,通常情况下吸盘固定且不可更换,而箱子尺寸较为多变,往往需要一个吸盘应对多种不同尺寸的箱子。 为了避免吸盘在抓取目标箱子时误吸到其周边的非目标箱子,拆垛时往往需要吸盘进行偏置抓取。
吸盘偏置共三种模式:默认、依边角号顺序、自定义策略优先级。
自定义策略优先级¶
该模式下用户可以指定吸盘偏置策略的优先级。
- 策略优先级
偏置策略共三种,分别为:中心对中心、边中点对边中点,角对角,可根据实际需求设置各级策略的偏置方式。
下图中橘黄色长方形代表箱子,灰色长方形代表吸盘,吸盘内部绿色代表开启的分区,红色代表关闭的分区。

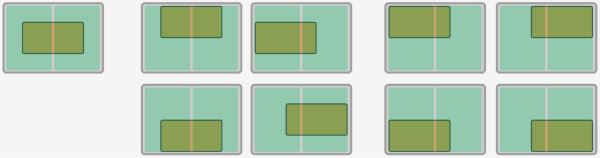
吸盘只开启单个分区
如下图所示,左侧为中心对中心抓取,中间为吸盘边中点对箱子边中点抓取,右侧为吸盘角对箱子角抓取。
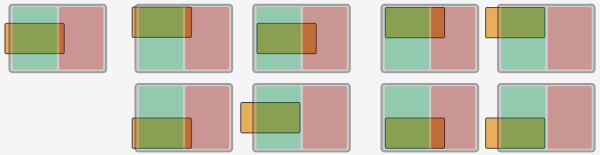
吸盘开启两个分区
如下图所示,左侧为中心对中心抓取,中间为吸盘边中点对箱子边中点抓取,右侧为吸盘角对箱子角抓取。
开启的吸盘分区多于两个时以此类推。
- 箱子覆盖率下限
限制吸盘抓取箱子时吸盘覆盖箱子上表面的最小覆盖率。当实际覆盖率低于阈值时,视为吸盘抓取箱子不牢固,不允许抓取。
- 吸盘朝向
吸盘朝向决定了吸盘在抓取箱子组时吸盘和箱子组之间的相对朝向。
通过设置 吸盘长边方向 与 朝向参考对象 参数,共有如下四种组合形式:
吸盘长边平行于箱子组长边。
吸盘长边垂直于箱子组长边。
吸盘长边平行于箱子组组合方向。
吸盘长边垂直于箱子组组合方向。
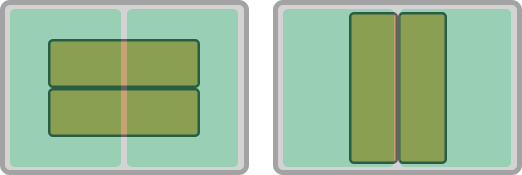
吸盘长边平行于纸箱组长边(左),垂直于纸箱组长边(右)¶
- 偏置次序
将吸盘偏置方式按照工具中心点相对于参考点的距离排序,工具中心点越靠近参考点的吸盘偏置方式排序越靠前。 勾选 相对于参考点距离排序 参数后,可设置以下参数。
- 参考点X/Y坐标
设定参考点位置。参考点会在三维仿真空间中出现。
- 仅保留排序靠前的偏置
在所有的偏置尝试中仅尝试部分可行性更高的解。
- 最大规划解数量
保留偏置解的最大数量。
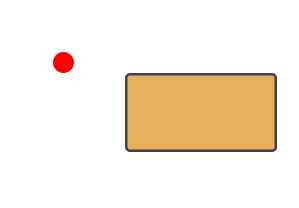
- 应用示例
如下图所示,参考点位于图中红点位置
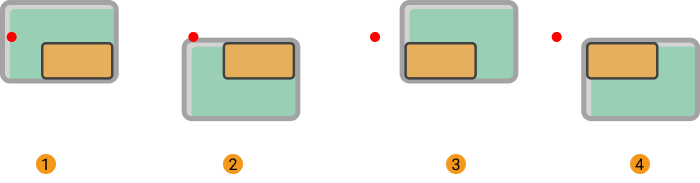
以仅使用 角对角 策略为例,软件进行偏置尝试的优先级如下图所示
依边角号顺序¶
该模式下吸盘将根据用户设置的边角号序列按顺序尝试抓取箱子。
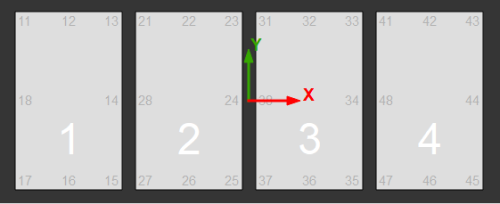
边角号在吸盘配置器中自动生成,如下图所示,位于每个吸盘分区边缘的两位数编号即为边角号。
- 箱子覆盖率下限
限制吸盘抓取箱子时吸盘覆盖箱子上表面的最小覆盖率。当实际覆盖率低于阈值时,视为吸盘抓取箱子不牢固,不允许抓取。
- 边角号序列
指定边角号序列。 示例:输入参数:11,17,21,22 ,软件将根据输入的边角号按顺序尝试抓取箱子。
- 吸盘朝向
吸盘朝向决定了吸盘在抓取箱子组时吸盘和箱子组之间的相对朝向。
通过设置 吸盘长边方向 与 朝向参考对象 参数,共有如下四种组合形式:
吸盘长边平行于箱子组长边。
吸盘长边垂直于箱子组长边。
吸盘长边平行于箱子组组合方向。
吸盘长边垂直于箱子组组合方向。
吸盘长边平行于纸箱组长边(左),垂直于纸箱组长边(右)¶