定点移动¶
功能描述¶
设定机器人运动路径中的一个目标位姿和运动到该位姿的方式。
参数说明¶
- 移动步骤基本参数
请参见: 移动步骤基本参数 。
- 已持有工件碰撞检测设置
请参见: 已持有工件碰撞检测设置 。
- 基本运动配置
请参见: 基本运动配置 。
智能避障¶
该功能本质上是为“定点移动”步骤对应的路径点增加多个周边的备选点,使机器人可以规划的路径数量更多,降低调试难度,提高规划成功率。
避障模式¶
根据对路径规划速度及成功率的要求,选择不同的 避障模式 。
关闭避障模式 :即不启用避障模式。速度优先 :以速度优先来规划路径,避障点数量最少。成功率优先 :以成功率优先来规划路径,避障点数量最多。平衡 : 平衡速度与成功率来规划路径,避障点数量中等。
- 位置调整范围半径
- 朝向调整角度范围
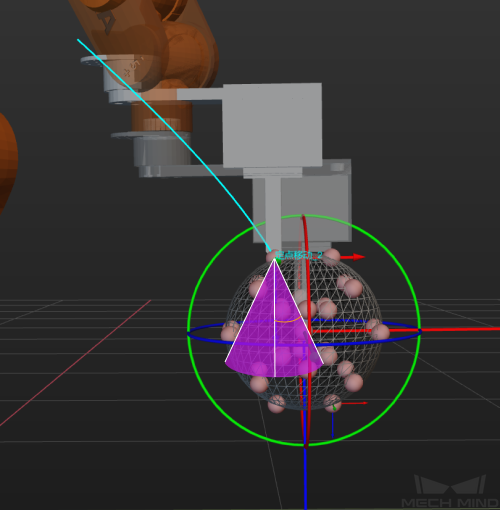
- 显示所有备选位姿
默认勾选,显示所有备选点。取消勾选后,将不显示备选点。
应用示例¶
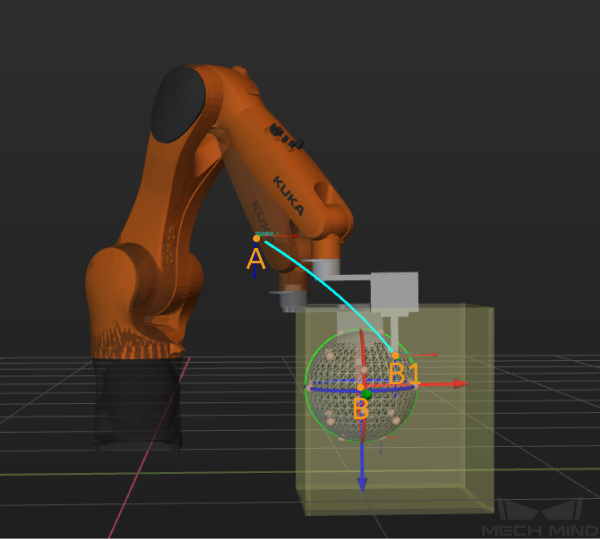
如下图所示,由路径点 A 运行到路径点 B ,末端工具会与筐壁发生碰撞。
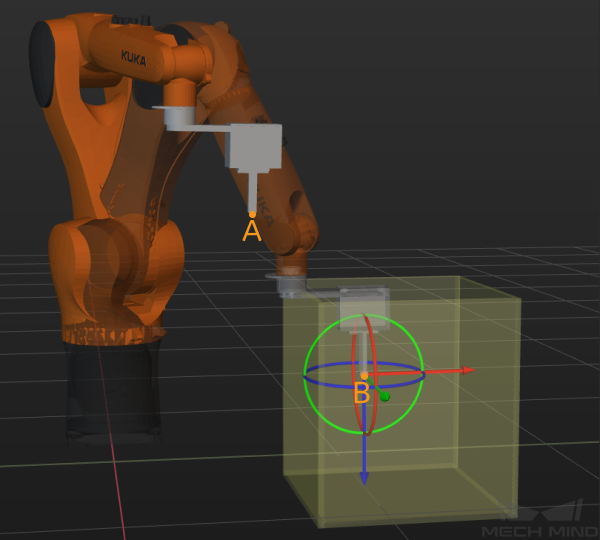
开启 B 点的避障模式并设置相关参数后,软件将在备选点中选择不会发生碰撞的避障点 B1 ,如下图所示。