获取被抓取物体的平面位姿¶
物流场景中为防止损坏包裹和传送带,新增了 动态放置 参数组。 动态放置 下的参数可以根据物体的高度来决定放置物体时机械臂末端工具的高度,以此避免以下两种情况:
机械臂放置时松开包裹的位置过高,导致在高速运行的传送带上包裹发生滚动。
机械臂放置时松开包裹的位置过低,导致包裹直接与传送带碰撞,挤压损坏包裹,甚至损坏传送带。
通常,被抓取物体会处于一个平面空间。在计算物体高度时需要使用这个平面位姿,因此在使用 动态放置 的参数前,需获取被抓取物体所在平面的位姿。
获取被抓取物体所在平面的位姿¶
获取被抓取物体所在平面的位姿时,需搭建一个工程,并调节参数。
搭建工程¶
新建/打开 Mech-Vision 工程。
选择 建立工程。
选择 打开物流工程。
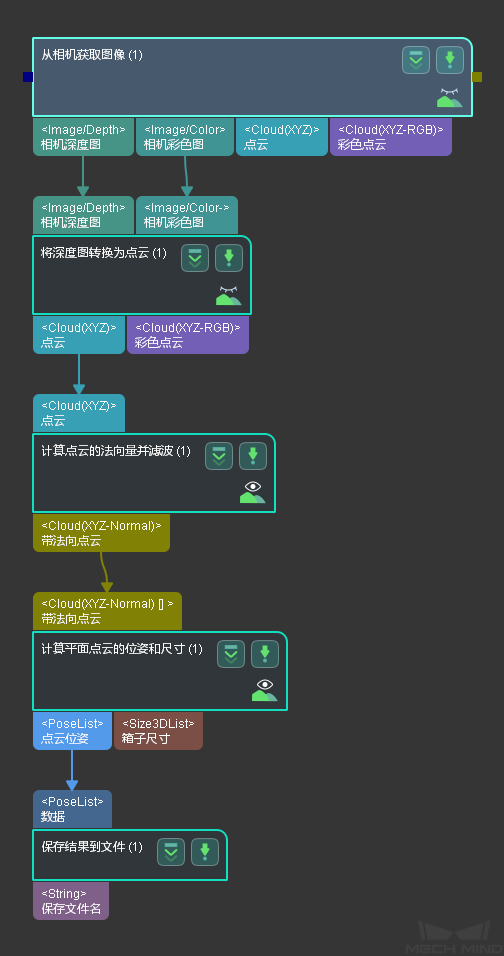
新增并连接步骤,步骤如下:从相机获取图像 > 将深度图转换为点云 > 计算点云的法向量并滤波 > 计算平面点云的位姿和尺寸 > 保存结果到文件,如下图所示。
从相机获取图像:单击 选择相机 ,选择并连接相机。
提示
需确认场景中没有物体,且相机获取的 2D 图与深度图正常。
将深度图转换为点云:单击 设置 2D 感兴趣区域 (ROI) ,设置感兴趣区域。
提示
设置感兴趣区域时,框选较为中心的区域即可。
计算平面点云的位姿和尺寸:打开 调试输出 功能,且打开该步骤的可视化功能,查看生成的点云位姿。
保存结果到文件:在 文件名前缀 中,输入 文件名前缀 的名称。
生成被抓取物体所在平面的位姿¶
工程搭建完成后,可生成被抓取物体所在平面的位姿。
单击 运行 ,运行整个工程。
查看 计算平面点云的位姿和尺寸 的可视化结果。
如位姿不在点云中心,需重新拍照,获取点云;
如位姿处于点云中心,请查看下一步。
位姿文件生成在工程目录下,且生成后自动打开文件夹。