开始
应用指南
软件使用指南
机器人通信配置指南
更多支持
附录
注解
该步骤的内容正在维护中。如果你急需了解该步骤的更多信息,请联系我们(docs@mech-mind.net)。
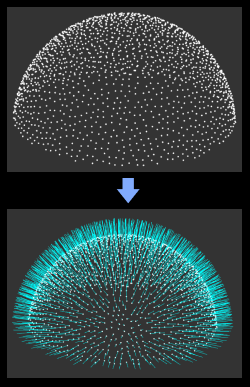
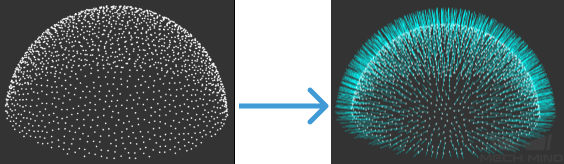
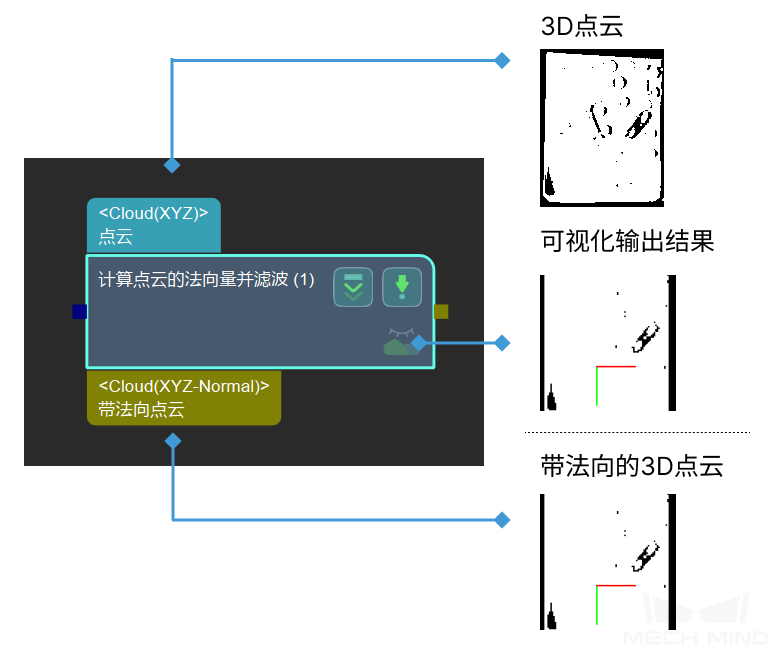
该步骤可计算点云法向,删除离群点。
该步骤用于为原始点云增加法向并去除离群点,通常在 从相机获取图像 、 将深度图转换为点云 步骤之后使用。