计算平面点云的位姿和尺寸¶
输入与输出¶
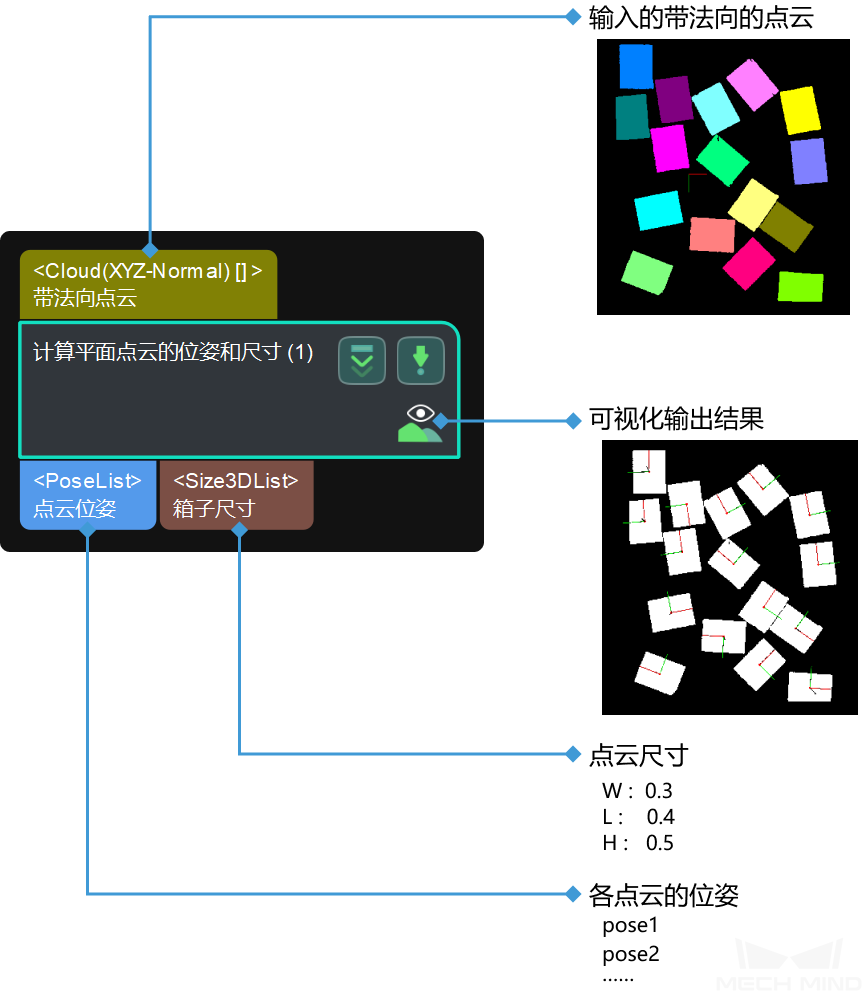
常用参数调节说明¶
位姿计算设置
提示
计算位姿中心的方法 与 计算位姿姿态的方法 需一一对应:
BoundingRectCenter 对应 BoundingRectOrientation;
CloudCenter 对应 CloudOrientation。
- 计算位姿中心的方法
- 参数解释:该参数用于指定位姿位置所在的中心。值列表:
BoundingRectCenter( 点云包围盒 中心):默认值。物体点云分布较均匀时使用,如下图右所示。
CloudCenter(点云中心):物体点云分布不均匀时使用,如下图左所示。

调节建议:根据实际需求设置该参数。 - 计算位姿姿态的方法
- 参数解释:该参数用于指定位姿的朝向。值列表:
BoundingRectOrientation( 点云包围盒 姿态):物体点云分布较均匀时使用,如上图右所示。
CloudOrientation(点云中心姿态):物体点云分布不均匀时使用,如上图左所示。
调节建议:根据实际需求设置该参数。 - 使用边对齐的外接矩形
- 参数解释:该参数用于决定是否令外接矩形的边尽量与物体轮廓平行。不勾选时,会直接使用最小外接矩形。默认值:不勾选。调节建议:根据实际需求设置该参数。
- 边对齐搜索半径
- 参数解释:该参数用于判断外接矩形与物体轮廓点是否对齐,单位为像素(px)。当轮廓点与外接矩形的距离小于该值时,认为轮廓点与外接矩形对齐。默认值:3 px
提示
勾选 使用边对齐的外接矩形 后,才可设置该参数。
箱子尺寸计算设置
提示
该参数组仅适用于箱子,不可用于计算麻袋。
- 计算箱子高度
- 参数解释:该参数用于计算箱子的 Z 向高度。默认值:不勾选。调节建议:仅在计算箱子的 Z 向高度时勾选该参数。
- 固定的箱底高度
- 参数解释:为了方便计算箱子的 Z 向高度,该参数用于设置放置箱子的底座的高度,该值一般为运送箱子的输送线或堆放平台在机器人坐标系下的高度。默认值:0 m调节建议:根据实际需求设置该参数。
提示
勾选 计算箱子高度 后,才可设置该参数。