Vizとの通信プログラム¶
プログラムの説明¶
Vizとの通信プログラムは、次のファイルで構成されています。その中、.srcはプログラムファイル、.datはデータファイル、.xmlは通信設定ファイルとなります。
ファイル名 |
説明 |
mm_server.sub |
Robserverからのデータを受信する、ロボットの位置姿勢、信号およびステータスデータを送信するためのバックグラウンドプログラム |
mm_server.dat |
バックグラウンドプログラムが対応する .datデータファイル |
motion_control.src |
ロボット動作を制御するためのフォアグラウンドプログラム |
mainmodule.src |
Vizとの通信プログラムのフォアグラウンドメインプログラム |
mainmodule.dat |
Vizとの通信プログラムのフォアグラウンドメインプログラムが対応する.datデータファイル |
mm_status.xml |
ロボット状態通信のコンフィグファイル |
mm_motion.xml |
ロボット動作通信のコンフィグファイル |
信号¶
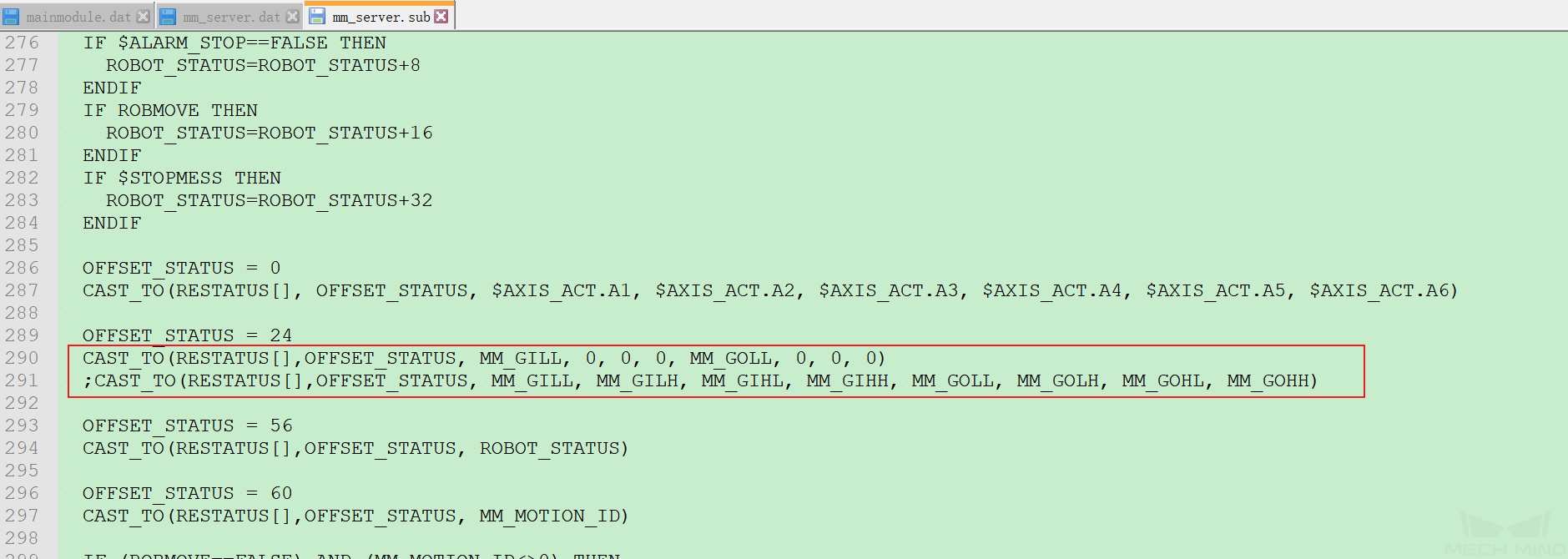
プログラムでは、デフォルトで16個のDI、DO信号をサポートしており、ユーザーがプログラムを修正することにより、64個まで拡張することが可能です。
修正方法:mm_serverファイルにおいて、290行目の前にセミコロン(コメント記号)を追加し、291行目の前にセミコロンを削除します。
信号表¶
内部フラグ名 |
ディスクリプション |
$FLAG[1] |
mm_motionが成功に接続したときのフラグ |
$FLAG[2] |
mm_motionがデータを受信したときのフラグ |
$FLAG[5] |
mm_statusが成功に接続したときのフラグ |
$FLAG[6] |
mm_statusがデータを受信したときのフラグ |
Vizティーチングの場合に使用されるIO |
信号 |
入力(16個) |
$IN[1] -$IN[16] |
出力(16個) |
$OUT[1]-$OUT[16] |
入力(64個) |
$IN[1] -$IN[64] |
出力(64個) |
$OUT[1]-$OUT[64] |