ELITE¶
本節では、VizによりELITEロボットをティーチングする方法について説明します。主に次の手順が含まれます。
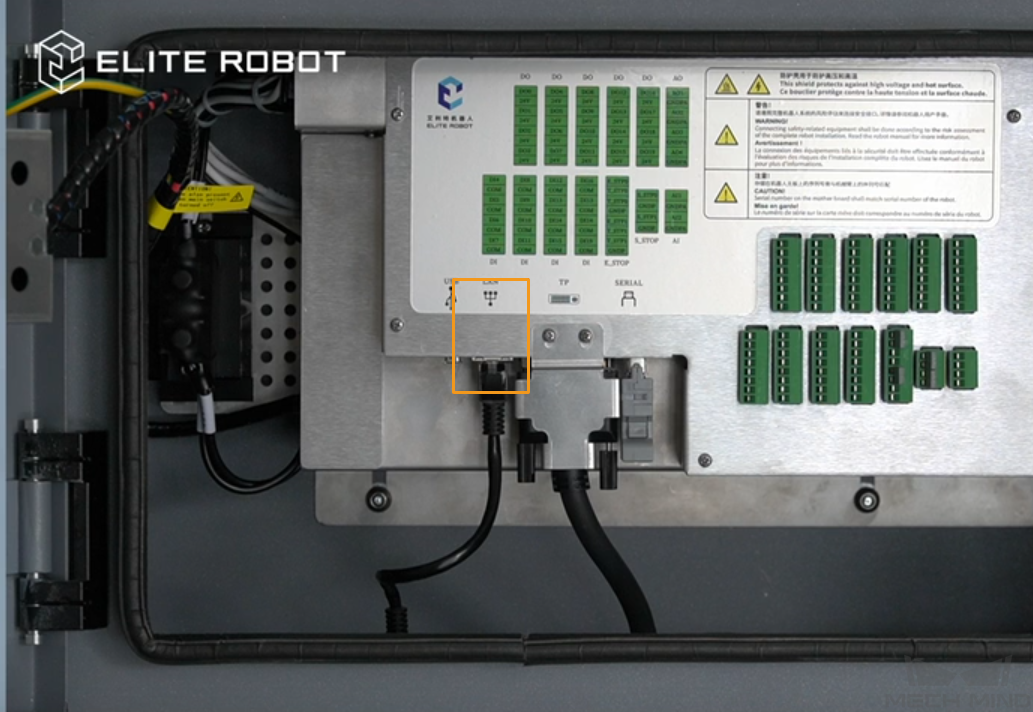
ネットワーク接続を確立¶
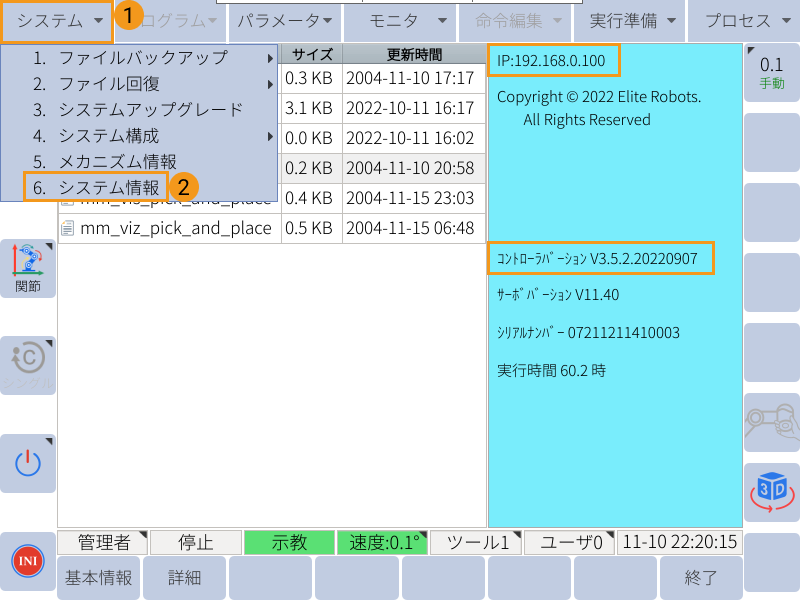
IPとコントローラのバージョンを確認¶
ティーチペンダントで をクリックし、IPとコントローラのバージョンを確認できます。
IPアドレスを変更¶
注釈
以下のいずれかのポートのIPアドレスを変更することで、両方のポートのIPアドレスが同じネットワークセグメントにあるようにすることができます。
ロボットコントローラのLANポート
ロボットと接続されている産業用PCのLANポート
ロボットのIPアドレスを変更するには、以下の手順を実行します。
管理者アカウントへ切替:キーを TEACH にし、左下のアカウントモードが 管理者 になっていることを確認します。
管理者 になっていない場合、アカウントモードをクリックして 管理者 を選択し、パスワード(初期パスワードは333333)を入力してから、左側隅にある 設定 をクリックします。
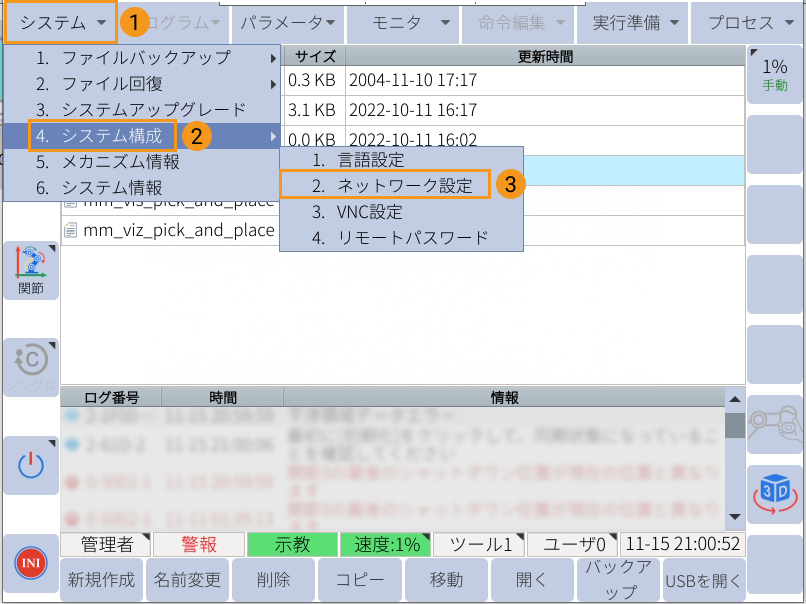
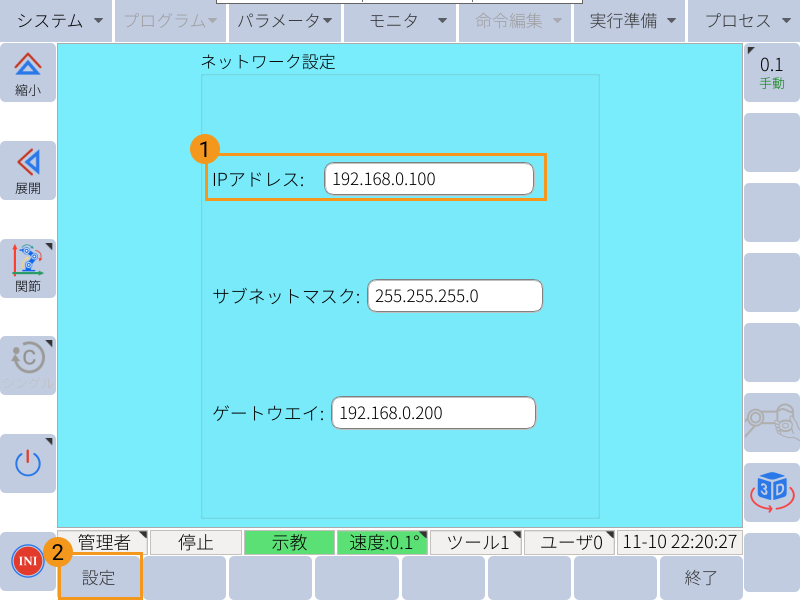
ティーチペンダントで を順番にクリックします。
これでIPを変更することができます。IPを変更したら、 設定 をクリックして変更を保存します。
ロボットを接続¶
ロボットファイルをバックアップ¶
ロボットシステムへの影響を避けるため、ロボットの接続を開始する前に、ロボットシステムのファイルをバックアップしておくことをお勧めします。操作中に問題が発生した場合、バックアップファイルを使用してロボットシステムを復元することができます。
USBメモリをコントローラのUSBポートに差し込みます。
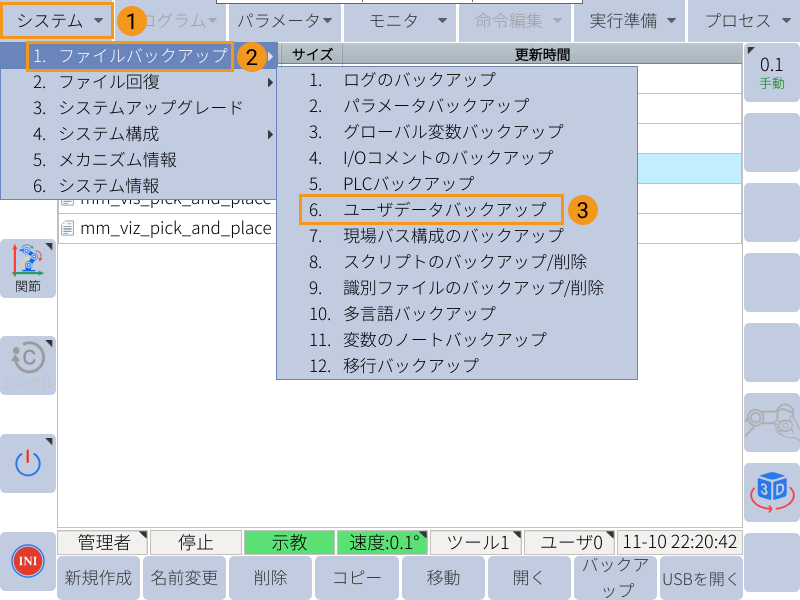
ティーチペンダントで を順番にクリックします。
ポップアップウィンドウで 確認 をクリックします。
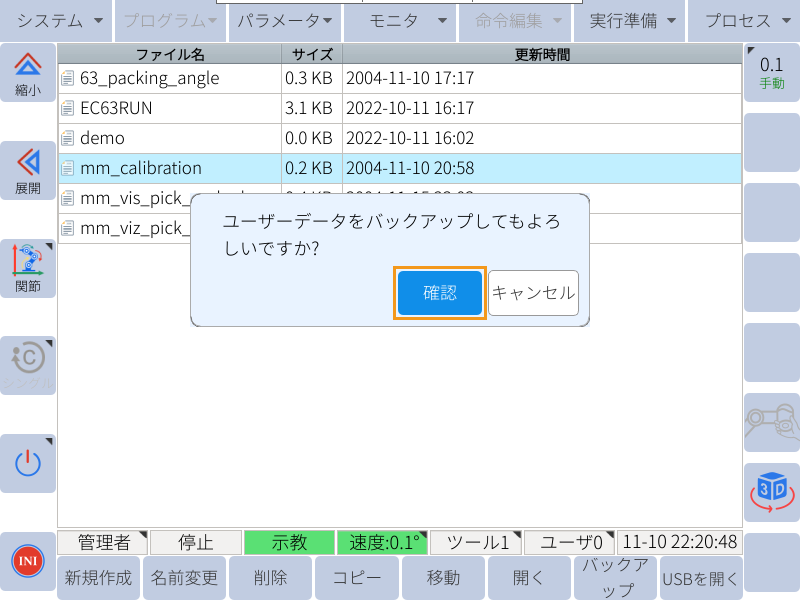
正常にバックアップした後、USBメモリに rbctrl という名前のフォルダが表示されます。ロボットのバックアップファイルは、このフォルダに自動的に保存されます。
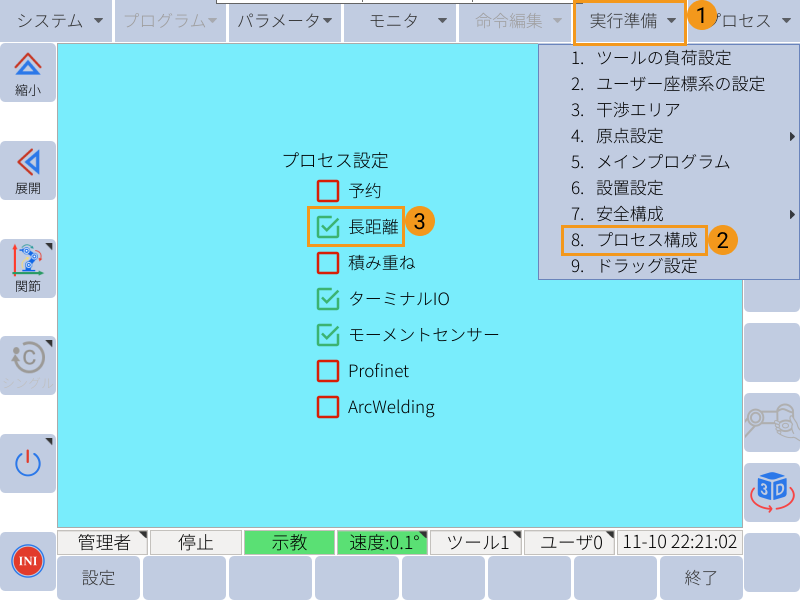
リモート機能の有効化¶
ティーチペンダントで をクリックし、 長距離 にチェックを入れてロボットを再起動します。ロボットのリモート機能がすでに有効になっている場合は、このステップをスキップしてください。
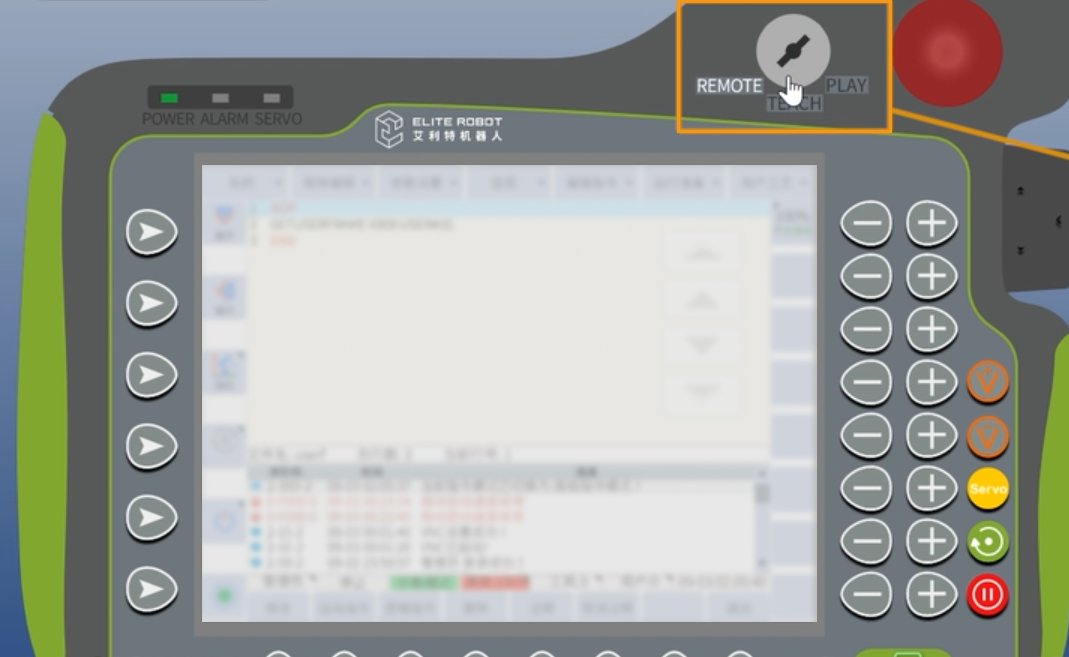
ティーチペンダントのキーをREMOTE(リモートモード)にします。
ロボットの接続状態をテスト¶
詳細については、 ロボットの接続状態をテスト をご参照ください。