位置姿勢の並進ベクトルを設定¶
注釈
このステップの内容は現在メンテナンス中です。本ステップについての情報が必要な場合は、Mech-Mind株式会社(メールアドレス:docs@mech-mind.net)までお問い合わせください。
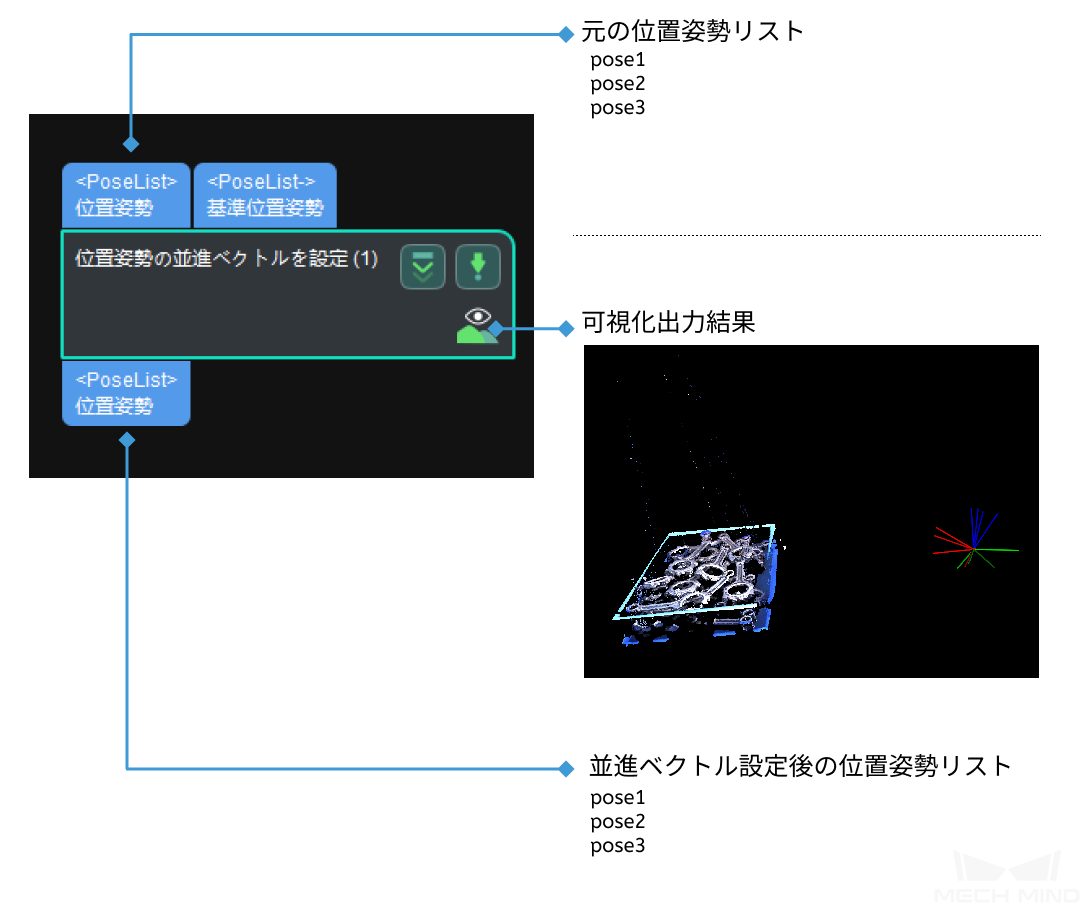
機能¶
基準位置姿勢もしくはパラメータで設定された基準方向を使用して元の位置姿勢の並進ベクトルを設定します。
使用シーン¶
汎用の位置姿勢の並進ベクトル設定ステップです。基準位置姿勢リストに複数の位置姿勢がある場合は、最初の位置姿勢の並進ベクトルのみが設定に使用されます。
入力と出力¶