輪郭から経路を生成¶
機能¶
入力された輪郭点群によって経路を生成します。
使用シーン¶
通常、長方形のドア/ガラスなど、エッジ接着の応用シーンで使用されます。
入力と出力¶
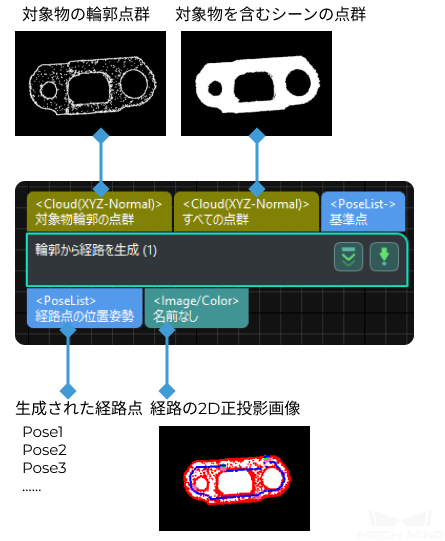
パラメータ説明¶
このパラメータには、以下の4つのパラメータ群があります。
一般設定: このパラメータ群は、一般的な場合に使用されます。実際の状況に応じて設定してください。
エッジポイントの平滑化設定: このパラメータ群は、部品のエッジ点群がギザギザに見える場合に調整する必要があります。
特殊場合向け収縮設定: このパラメータ群は、特殊なプロジェクトでのみ使用され、一般に調整する必要はありません。
コーナー検出: 部品のエッジ点群に明らかなコーナーがある場合に調整される必要があります。
一般設定
- マスククロージング処理のカーネルサイズ
- パラメータ説明:このパラメータは、画像マスクに対してクロージング処理を行う際のカーネルのサイズ(ピクセル単位)を設定するために使用されます。初期値:5px
- 経路点の間隔
- パラメータ説明:このパラメータは、生成された経路点の間隔(ピクセル単位)を設定するために使用されます。この値が大きいほど、生成された経路点の間隔が大きくなり、値が小さいほど、生成された経路点の間隔が小さくなります。調整効果を 調整の例 に示します。初期値:10px
- エッジのスケーリング方法
- パラメータ説明:このパラメータは、経路点を生成する際にエッジ点群のスケーリング方法を選択するために使用されます。オプション:収縮、エッジポイントへの接線の垂直方向に沿ったスケーリング。
収縮:パラメータ 収縮カーネルサイズ の設定により、スケーリングの距離と方向を調整します。
エッジポイントへの接線の垂直方向に沿ったスケーリング:パラメータ 垂直方向の移動距離 の設定により、スケーリングの距離と方向を調整します。
初期値:収縮。調整アドバイス:初期値を使用することを推奨します。 - 収縮カーネルサイズ
- パラメータ説明:このパラメータは、 エッジのスケーリング方法 が 収縮 に設定された場合に、経路のスケーリングスケールと方向(ピクセル単位)を設定するために使用されます。この値が正の場合、経路は部品エッジの内側に向かって縮小し、値が大きくなるほど縮小します。この値が負の場合、経路は部品エッジの外側に向かって拡大し、値が小さいほど広がります。調整効果を 調整の例 に示します。初期値:15px
- 垂直方向の移動距離
- パラメータ説明:このパラメータは、 エッジのスケーリング方法 が エッジポイントへの接線の垂直方向に沿ったスケーリング に設定された場合に、スケーリングスケールと方向(ミリメートル単位)を設定するために使用されます。この値が正の場合、経路は部品エッジの内側に向かって縮小し、値が大きくなるほど縮小します。この値が負の場合、経路は部品エッジの外側に向かって拡大し、値が小さいほど広がります。調整効果を 調整の例 に示します。初期値:15mm
エッジポイントの平滑化設定
- ガウシアンフィルタを使用
- パラメータ説明:このパラメータは、部品のエッジ点群がギザギザに見える場合にガウシアンフィルタでエッジ点群を平滑化するかどうかを決定するために使用されます。初期値:チェックを入れない。調整アドバイス:実際の状況に応じて設定してください。
- ガウシアンフィルタ半径
- パラメータ説明:このパラメータは、ガウシアンフィルタを使用する場合にフィルタ半径(ピクセル単位)を設定するために使用されます。初期値:20px調整アドバイス:初期値を使用ことを推奨します。
- ガウシアンフィルタのシグマ値
- パラメータ説明:このパラメータは、ガウシアンフィルタを使用する場合にシグマ値を設定するために使用されます。初期値:5.0000調整アドバイス:初期値を使用ことを推奨します。
特殊場合向け収縮設定
このパラメータ群は、特殊なプロジェクトでのみ使用され、一般に調整する必要はありません。
コーナー検出
- エッジ点群のダウンサンプリング係数
- パラメータ説明:このパラメータは、部品のエッジ点群をダウンサンプリングするときのダウンサンプリング係数(ピクセル単位)を設定するために使用されます。部品のエッジ点群のダウンサンプリングにより、コーナーの検出が容易になります。初期値:3
- 品質レベル
- パラメータ説明:このパラメータは、対象物のコーナーを検出するために使用され、経路点の間隔がどのように調整されても、エッジのコーナーに経路点が存在することを保証します。初期値:0.0100調整アドバイス:初期値を使用ことを推奨します。
- コーナー間の最小ピクセル
- パラメータ説明:このパラメータは、コーナー検出時にコーナー間の最小ピクセル数を設定するために使用されます。初期値:50.0000
- コーナーの最大数
- パラメータ説明:このパラメータは、対象物エッジのコーナーの最大数を設定するために使用されます。初期値:4
- 検出領域サイズ
- パラメータ説明:このパラメータは、部品の点群エッジにある目立たないコーナーを検出するために使用されます。点群のエッジが滑らかである場合に上げることができます。初期値:10
- Harris検出方法を使用
- パラメータ説明:このパラメータは、Harris検出方法を使用するかどうかを設定するために使用されます。チェックを入れた後、 K 値を設定する必要があります。初期値:チェックを入れない。調整アドバイス:一般的には、この方法を使用する必要はありません。
調整の例¶
経路点の間隔¶
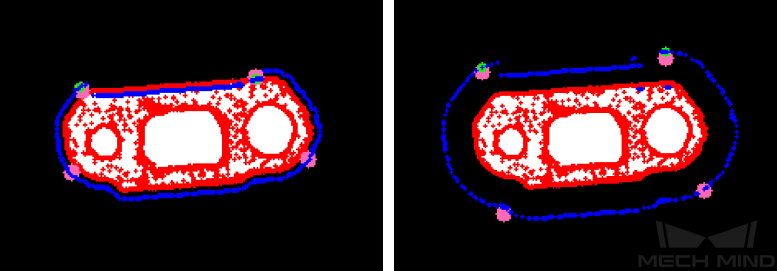
経路点の間隔 をそれぞれ 20 と 5 に設定した場合、このステップによって生成された経路点を下図に示します。
左側のは 20 に設定した場合の効果で、経路点がまばらになっています。右側のは 5 に設定した場合の効果で、経路点が密集しています。
収縮カーネルサイズ¶
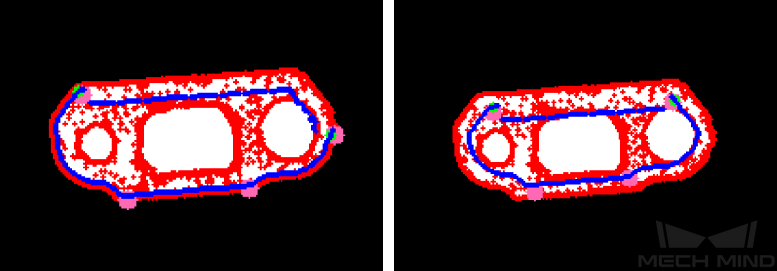
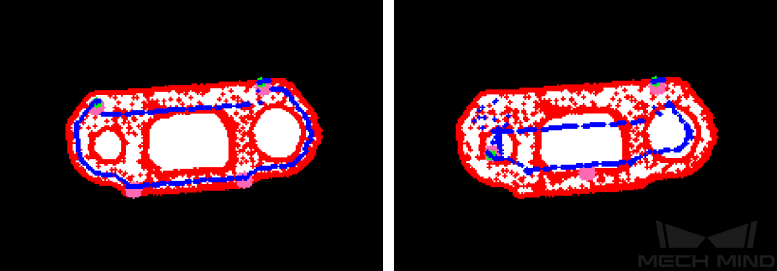
収縮カーネルサイズ をそれぞれ 5 と 15 に設定した場合、このステップによって生成された経路を下図に示します。
左側のは 5 に設定した場合の効果で、右側のは 15 に設定した場合の効果です。この正の数の値が大きくなると、経路は部品エッジの内側に向かって縮小します。
収縮カーネルサイズ をそれぞれ -5 と -20 に設定した場合、このステップによって生成された経路を下図に示します。
左側のは -5 に設定した場合の効果で、右側のは -20 に設定した場合の効果です。この負の値が小さくなると、経路は部品エッジの外側に向かって拡大します。

垂直方向の移動距離¶
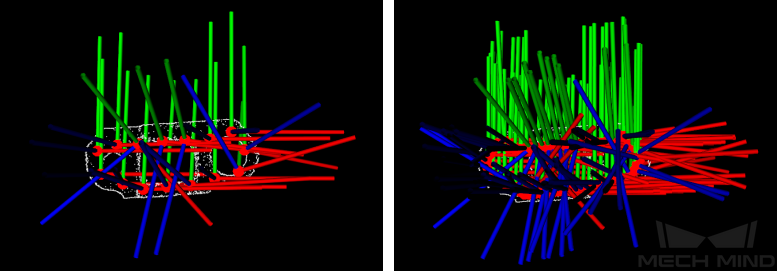
垂直方向の移動距離 をそれぞれ 5 と 15 に設定した場合、このステップによって生成された経路を下図に示します。
左側のは 5 に設定した場合の効果で、右側のは 15 に設定した場合の効果です。この正の数の値が大きくなると、経路は部品エッジの内側に向かって縮小します。
垂直方向の移動距離 をそれぞれ -5 と -20 に設定した場合、このステップによって生成された経路を下図に示します。
左側のは -5 に設定した場合の効果で、右側のは -20 に設定した場合の効果です。この負の値が小さくなると、経路は部品エッジの外側に向かって拡大します。