Update Held Workobject¶
Function¶
Update the pose or size of the held workobject via the vision service to avoid collisions.
Hint
The pose of the held workobject refers to the pose of the object from the time the robot picks it to the time it is put down.
Usage Scenario¶
This Step is usually used when the obtained object size or pose is inaccurate.
In order to avoid collisions, an accurate size and pose of the held workobject should be re-obtained, and you will need to re-select the collision model for the collision detection.
The collision model of the held workobject supports cuboids and cylinders that are picked vertically or horizontally.
This Step may interrupt the path planning of move-type Steps.
Parameter Description¶
- Basic Non-Move
Please refer to General Parameters of Non-Move Steps for detailed information.
Update Approach
There are two update approaches: Property Value and Vision Service.
Property Value
Please use this approach when there is not available size of the held workobject or the robot is not guided by the vision service. You can set a model of the object and the model will be attached to the end of the tool for collision detection.
- Object Type
Cuboid, Vertical Cylinder, Horizontal Cylinder, and Disc.
- Pose Needs Updating
Select to update the pose in TCP, and you can adjust the updated pose in Pose Update. Unselected by default.
- Size Needs Updating
Select to update the size of the held workobject, and you can adjust the updated size in Size Update. Unselected by default.
- Disc Configuration File Path
Click
to select the brake disc configuration file in JSON format.
Hint
You can only adjust the size of the brake disc.
Vision Service
When the robot moves the object to a proper position, the camera can re-capture an image and the software can re-calculate the size and pose in TCP of the held workobject.
Update Content
- Pose Needs Updating
Selected by default, i.e., update the object pose in TCP to the project.
- Size Needs Updating
Selected by default, i.e., update the object size to the project.
Motion Pre-Plan
- Pre Plan Out Port
Select an exit port for path pre-planning.
Note
In order to make the path planning process in actual application continuous, the software will execute a pre-planning beforehand on the backend. Specifying a pre-plan exit port along which the project is most likely to proceed can reduce the probability of re-planning and the wait time of the robot.
0: Take the No need to update exit port when the deviation from the original vision result is below the Updating Threshold.
1: Take the Update exit port when the deviation from the original vision result is above the Updating Threshold.
2: Take the Exception exit port when an error of the vision service occurs.
Updating Threshold
- Needs Accuracy Check
Selected by default. You can adjust the Size Threshold, Translation Threshold and Rotation Threshold to specify the Updating Threshold. Unselect this parameter and no updating threshold will be set.
Usage Example¶
You can use this Step in conjunction with Classify and Mixed Pallet Pattern.
Use in conjunction with Classify:
Please select the Get Label from “Update Held Workobject” in Classify.
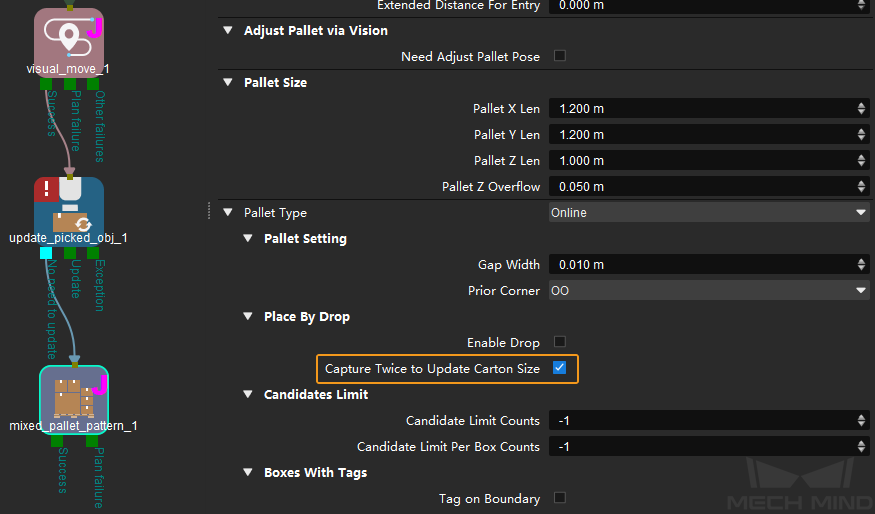
Use in conjunction with mixed_pallet_pattern:
In the paraeters panel of mixed_pallet_pattern, go to , and select Capture Twice to Update Carton Size, as shown below.