Mech-Eye Viewer
신규 모델 NANO ULTRA 지원
Mech-Eye SDK 2.3.3 버전에서는 새로운 카메라 모델 NANO ULTRA를 연결하여 데이터 획득 및 파라미터 조정 등 작업을 수행할 수 있습니다. 또한, NANO ULTRA에는 반사형 부품 용접을 위한 사전 설정 파라미터 그룹이 제공됩니다. 이는 반사형 부품 용접 또는 두 공작물을 특정 각도로 용접하는 등 반사되기 쉬운 응용 시나리오에 적합합니다.
|
|
|
|
|
|


NANO ULTRA 기술적 파라미터에 관한 상세한 정보는 NANO ULTRA 내용을 참조하십시오.
| Mech-Vision을 통해 NANO ULTRA 카메라를 연결해야 하는 경우, 1.8.2 또는 이상 버전의 소프트웨어를 사용해야 합니다. |
PRO S 및 PRO M: 프린지 코딩 모드를 사용할 때, 빛 반사가 있는 물체에 대한 이미징 속도와 성능 향상
PRO S 및 PRO M 시리즈의 카메라 펌웨어를 2.3.3 버전으로 업그레이드한 후, 프린지 코딩 모드 파라미터의 Reflective 옵션을 사용하여 이미지를 획득할 때 이미징 성능이 크게 향상됩니다. 구체적으로 다음과 같습니다.
-
2.3.2 버전에 비해 이미지 캡처 시간은 단축됩니다.
-
ROI가 설정되지 않은 경우, 뎁스 맵의 캡처 시간은 약 20% 단축됩니다.
-
ROI를 설정하면 뎁스 맵의 캡처 시간을 더 단축할 수 있습니다.
ROI의 면적을 원본 이미지의 1/2로 설정하면 뎁스 맵의 캡처 시간이 약 32% 단축되고, ROI의 면적을 원본 이미지의 1/4로 설정하면 뎁스 맵의 캡처 시간이 약 40% 단축됩니다.
-
-
다음과 같은 뎁 스 맵 퀄리티에 영향을 미치는 상항에 더 잘 대처할 수 있습니다.
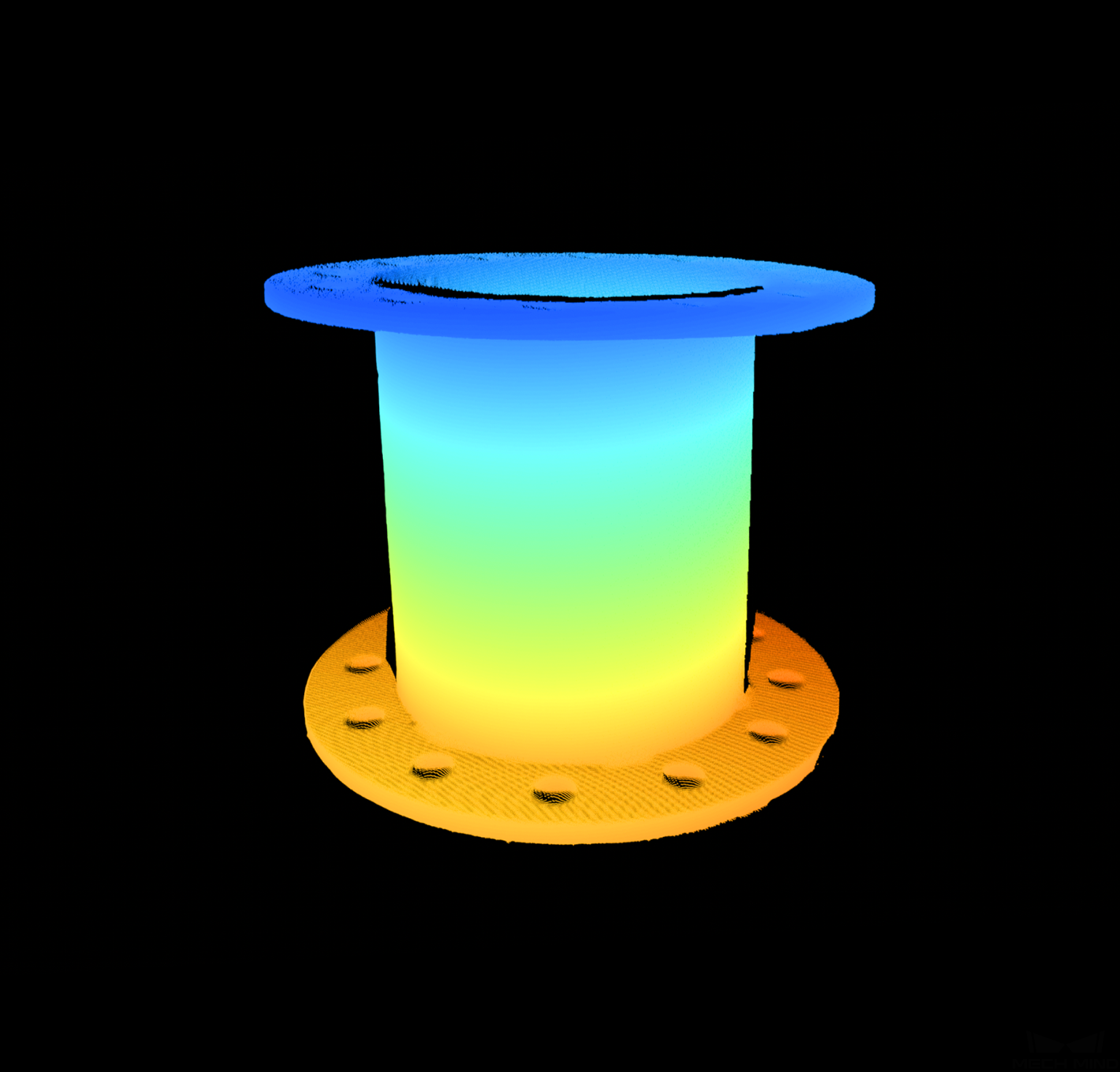
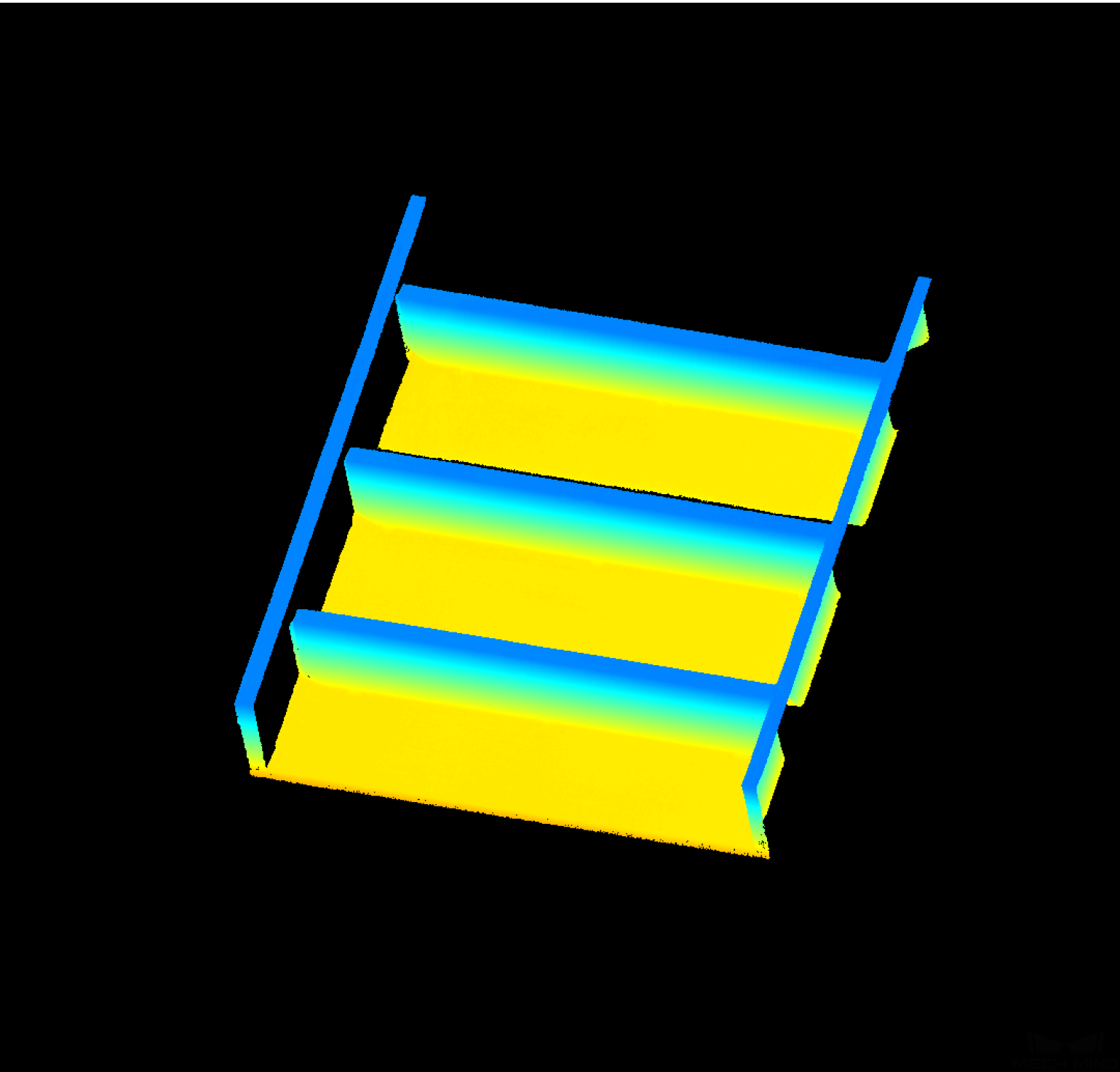
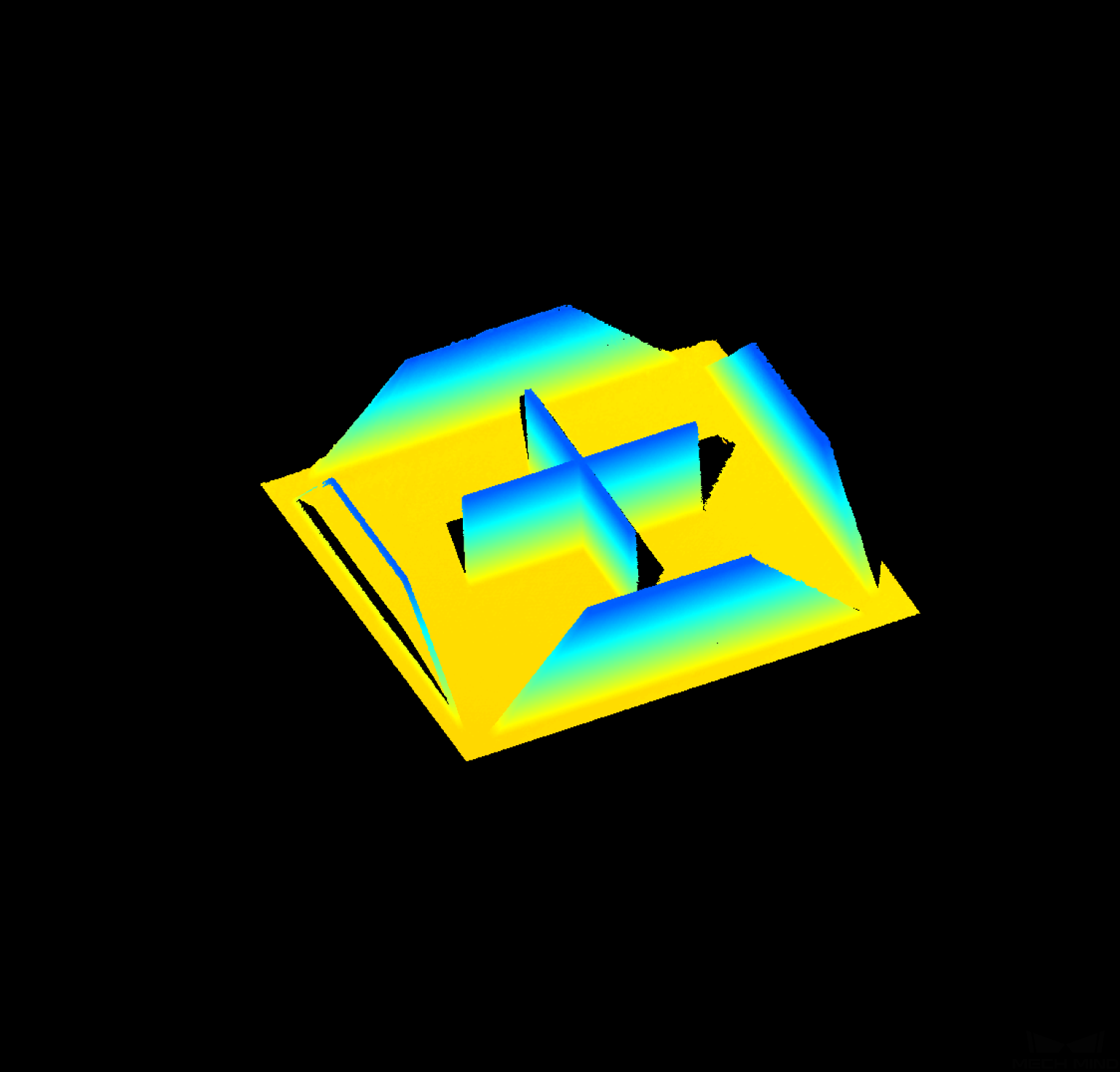
일반적인 문제 대상물 2.3.2 2.3.3 다중 반사로 인한 데이터 손실 또는 잘못된 뎁스 데이터

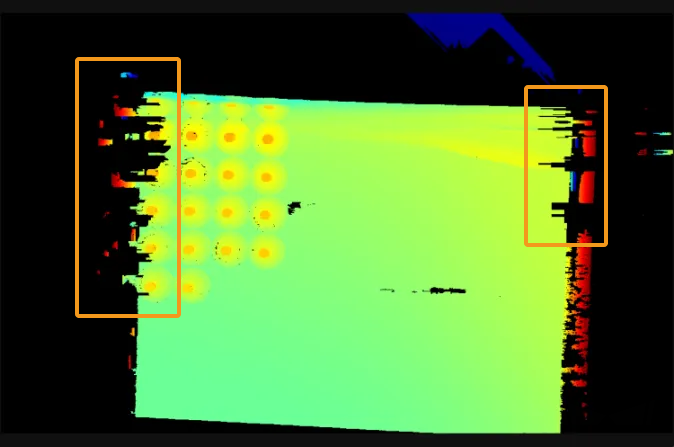
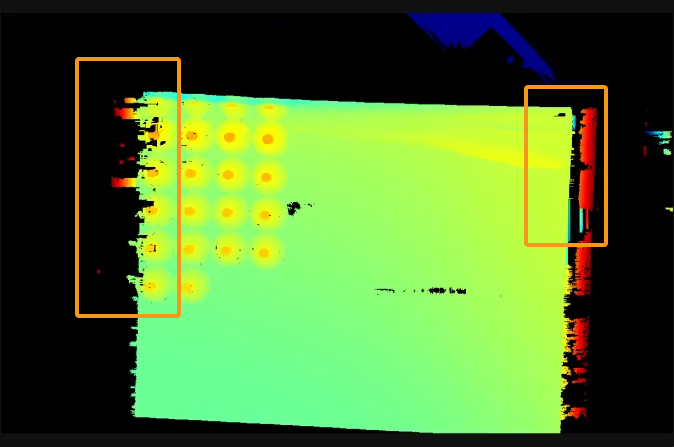

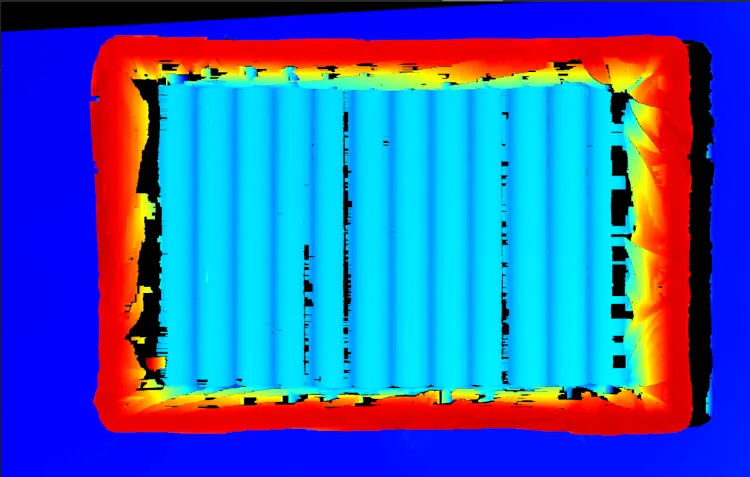
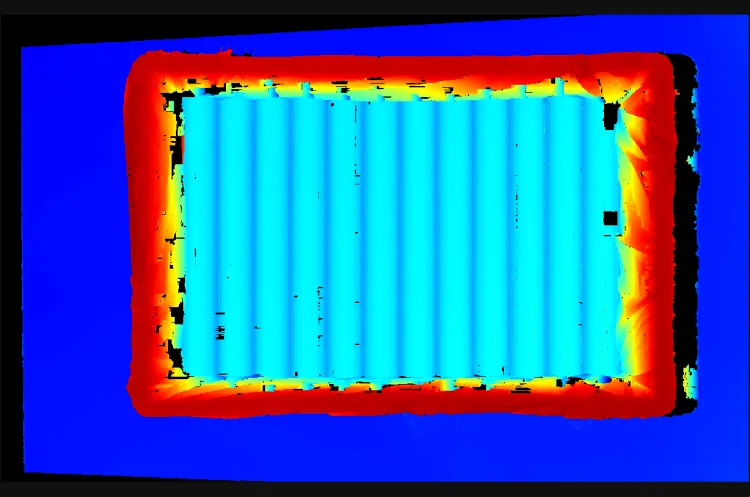
공중에 떠 있는 물체의 잘못된 뎁스 데이터


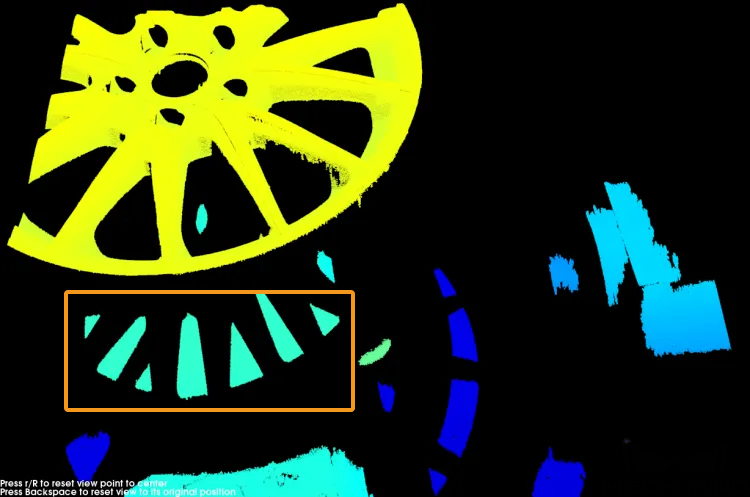
빛번짐으로 인한 데이터 손실

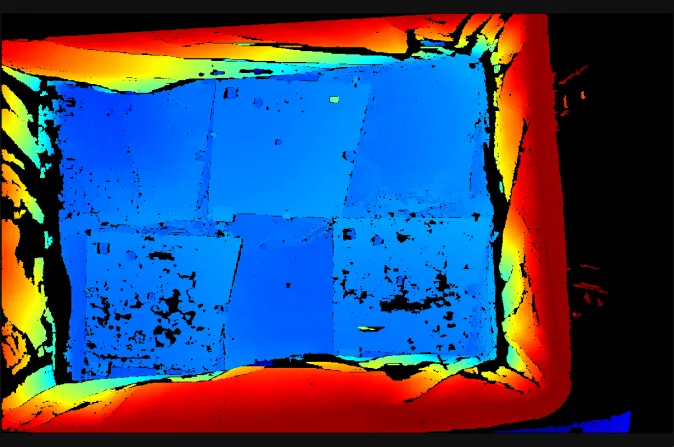
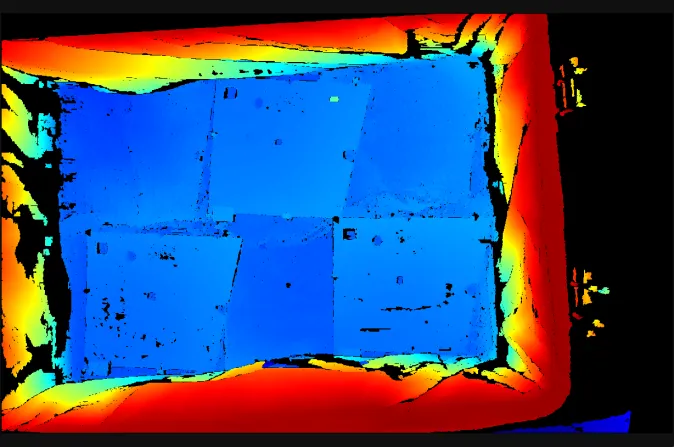
또한 새버전에서는 Reflective 옵션을 사용할 때 스트라이프 대비 역치 파라미터를 조정할 수 있습니다.
문제 복구
Mech-Eye SDK 2.3.3 버전에서는 다음 문제를 복구했습니다.
-
NANO: 노출 횟수 파라미터의 값이 1보다 클 때, 프린지 코딩 모드의 값을 Accurate에서 Fast로 변경한 후, 첫 번째 데이터 획득 라운드에서 뎁스 맵의 모든 픽셀 값이 오류값(NaN)인 문제를 해결했습니다.
-
NANO: 동일한 파라미터 구성을 사용하는 경우, 2D 이미지를 획득하는 데 소요되는 시간이 Nano보다 100~200ms 더 길어지는 문제를 해결했습니다.
-
데이터 저장 창에서 데이터 유형을 선택하지 않으면 같은 이름의 파일을 교체하기 옵션이 비활성화되는 문제를 해결했습니다.
-
2.1.0 및 이하 버전을 사용하여 저장된 가상 장치 파일은 열 수 없는 문제를 해결했습니다.
Mech-Eye API
신규 모델 NANO ULTRA 지원
Mech-Eye SDK 2.3.3 버전에서는 새로운 카메라 모델 NANO ULTRA를 연결하여 데이터 획득 및 파라미터 조정 등 작업을 수행할 수 있습니다. 또한, NANO ULTRA에는 반사형 부품 용접을 위한 사전 설정 파라미터 그룹이 제공됩니다. 이는 반사형 부품 용접 또는 두 공작물을 특정 각도로 용접하는 등 반사되기 쉬운 응용 시나리오에 적합합니다.
|
|
|
|
|
|
NANO ULTRA 기술적 파라미터에 관한 상세한 정보는 NANO ULTRA 내용을 참조하십시오.
| Mech-Vision을 통해 NANO ULTRA 카메라를 연결해야 하는 경우, 1.8.2 또는 이상 버전의 소프트웨어를 사용해야 합니다. |
PRO S 및 PRO M: 프린지 코딩 모드(Reflective 옵션)의 속도와 성능 향상
PRO S 및 PRO M 시리즈의 카메라 펌웨어를 2.3.3 버전으로 업그레이드한 후, ProjectorFringeCodingMode(프린지 코딩 모드) 파라미터의 Reflective 옵션을 사용할 때 성능이 향상됩니다. 구체적으로 다음과 같습니다.
-
2.3.2 버전에 비해 이미지 캡처 시간은 단축됩니다.
-
ROI가 설정되지 않은 경우, 뎁스 맵의 캡처 시간은 약 20% 단축됩니다.
-
ROI를 설정하면 뎁스 맵의 캡처 시간을 더 단축할 수 있습니다. ROI의 면적을 원본 이미지의 1/2로 설정하면 뎁스 맵의 캡처 시간이 약 32% 단축되고, ROI의 면적을 원본 이미지의 1/4로 설정하면 뎁스 맵의 캡처 시간이 약 40% 단축됩니다.
-
-
다음과 같은 뎁 스 맵 퀄리티에 영향을 미치는 상항에 더 잘 대처할 수 있습니다.
일반적인 문제 대상물 2.3.2 2.3.3 다중 반사로 인한 데이터 손실 또는 잘못된 뎁스 데이터
공중에 떠 있는 물체의 잘못된 뎁스 데이터
빛번짐으로 인한 데이터 손실
또한 새버전에서는 Reflective 옵션을 사용할 때FringeContrastThreshold(스트라이프 대비 역치) 파라미터를 조정할 수 있습니다.
문제 복구
Mech-Eye SDK 2.3.3 버전에서는 다음 문제를 복구했습니다.
-
NANO: 노출 횟수 파라미터의 값이 1보다 클 때, 프린지 코딩 모드의 값을 Accurate에서 Fast로 변경한 후, 첫 번째 데이터 획득 라운드에서 뎁스 맵의 모든 픽셀 값이 오류값(NaN)인 문제를 해결했습니다.
-
NANO: 동일한 파라미터 구성을 사용하는 경우, 2D 이미지를 획득하는 데 소요되는 시간이 Nano보다 100~200ms 더 길어지는 문제를 해결했습니다.
-
Python의 capture_stereo_2d_images 샘플 프로그램의 26행에 있는
get_color_image()명령어가 실수로get_gray_scale_image()로 작성되는 오류를 수정했습니다.
GenICam 인터페이스
신규 모델 NANO ULTRA 지원
Mech-Eye SDK 2.3.3 버전에서는 새로운 카메라 모델 NANO ULTRA를 연결하여 데이터 획득 및 파라미터 조정 등 작업을 수행할 수 있습니다. 또한, NANO ULTRA에는 반사형 부품 용접을 위한 사전 설정 파라미터 그룹이 제공됩니다. 이는 반사형 부품 용접 또는 두 공작물을 특정 각도로 용접하는 등 반사되기 쉬운 응용 시나리오에 적합합니다.
|
|
|
|
|
|
NANO ULTRA 기술적 파라미터에 관한 상세한 정보는 NANO ULTRA 내용을 참조하십시오.
| Mech-Vision을 통해 NANO ULTRA 카메라를 연결해야 하는 경우, 1.8.2 또는 이상 버전의 소프트웨어를 사용해야 합니다. |
PRO S 및 PRO M: 프린지 코딩 모드(Reflective 옵션)의 속도와 성능 향상
PRO S 및 PRO M 시리즈의 카메라 펌웨어를 2.3.3 버전으로 업그레이드한 후, ProjectorFringeCodingMode(프린지 코딩 모드) 파라미터의 Reflective 옵션을 사용할 때 성능이 향상됩니다. 구체적으로 다음과 같습니다.
-
2.3.2 버전에 비해 이미지 캡처 시간은 단축됩니다.
-
ROI가 설정되지 않은 경우, 뎁스 맵의 캡처 시간은 약 20% 단축됩니다.
-
ROI를 설정하면 뎁스 맵의 캡처 시간을 더 단축할 수 있습니다. ROI의 면적을 원본 이미지의 1/2로 설정하면 뎁스 맵의 캡처 시간이 약 32% 단축되고, ROI의 면적을 원본 이미지의 1/4로 설정하면 뎁스 맵의 캡처 시간이 약 40% 단축됩니다.
-
-
다음과 같은 뎁 스 맵 퀄리티에 영향을 미치는 상항에 더 잘 대처할 수 있습니다.
일반적인 문제 대상물 2.3.2 2.3.3 다중 반사로 인한 데이터 손실 또는 잘못된 뎁스 데이터
공중에 떠 있는 물체의 잘못된 뎁스 데이터
빛번짐으로 인한 데이터 손실
또한 새버전에서는 Reflective 옵션을 사용할 때FringeContrastThreshold(스트라이프 대비 역치) 파라미터를 조정할 수 있습니다.
문제 복구
Mech-Eye SDK 2.3.3 버전에서는 다음 문제를 복구했습니다.
-
NANO: 노출 횟수 파라미터의 값이 1보다 클 때, 프린지 코딩 모드의 값을 Accurate에서 Fast로 변경한 후, 첫 번째 데이터 획득 라운드에서 뎁스 맵의 모든 픽셀 값이 오류값(NaN)인 문제를 해결했습니다.
-
NANO: 동일한 파라미터 구성을 사용하는 경우, 2D 이미지를 획득하는 데 소요되는 시간이 Nano보다 100~200ms 더 길어지는 문제를 해결했습니다.
-
(가끔 발생) 카메라 연결이 끊겨서 단시간에 발견이 안되었다가 자동으로 복구되는 문제를 해결했습니다.