选择机器人¶
本节介绍如何选择机器人。
单击 Mech-Vision 工具栏中 机器人与接口配置 。
选择机器人。
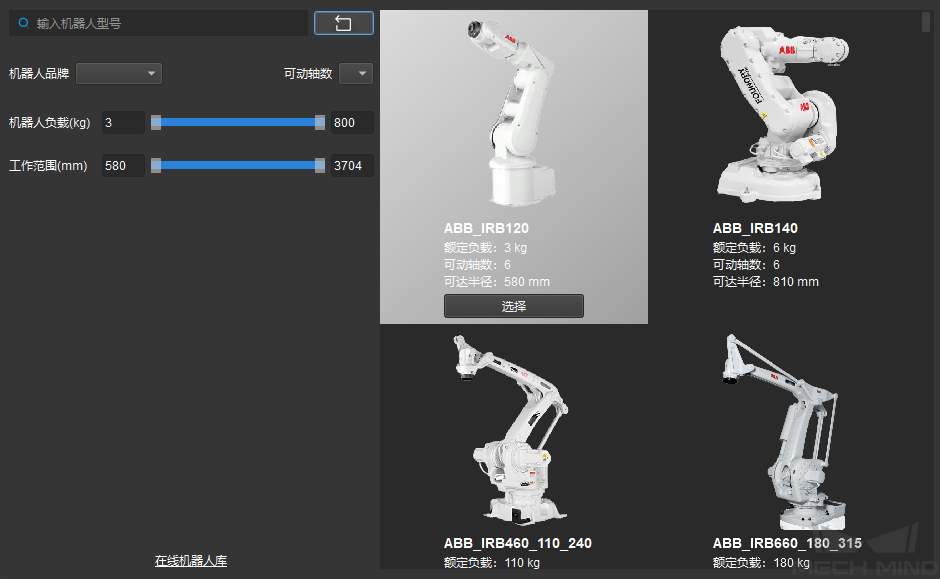
选择品牌机器人
选择其他机器人(例如桁架机器人)
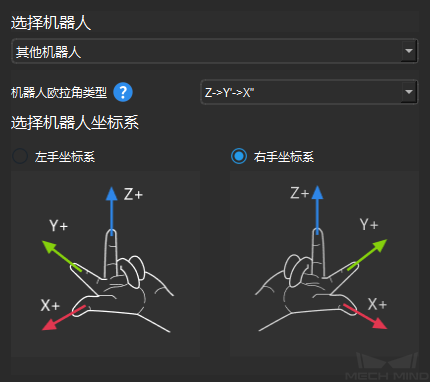
单击 选择机器人 下拉框,选择 其他机器人 。
选择机器人欧拉角类型。
选择机器人坐标系。
单击 下一步 ,进入 配置通信 界面。
选择不使用机器人(无机器人场景,例如测量)
单击 选择机器人 下拉框,选择 不使用机器人 。
单击 下一步 ,进入 Adapter 通信配置 界面。
注意
选择 不使用机器人 后,通信方式只能选择 Adapter 通信。