开始
应用指南
软件使用指南
机器人通信配置指南
更多支持
附录
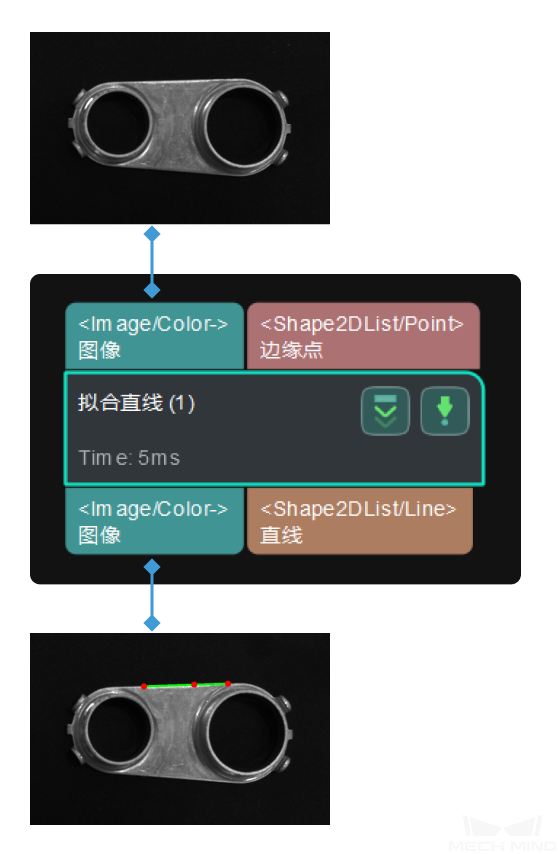
该步骤将输入的 2D 图像中的点拟合成直线。
该步骤一般适用于测量场景。
拟合方法
参数解释:指定拟合直线的方法。 值列表:Huber、最小二乘法。 默认值:Huber 最小二乘法:使用最小二乘法来拟合直线,使用该方法时,各点与拟合得到的直线的距离之和最小。 Huber:使用加权的最小二乘法来拟合直线,该方法可减小异常点对拟合得到的直线的影响。 调节说明:一般情况下,建议使用默认设置。
最小二乘法:使用最小二乘法来拟合直线,使用该方法时,各点与拟合得到的直线的距离之和最小。
Huber:使用加权的最小二乘法来拟合直线,该方法可减小异常点对拟合得到的直线的影响。