解系¶
Mech-Viz中机器人某一工具位姿求解过程中,由关节角求解工具姿态是唯一解,此为正解; 由工具位姿反推关节角时,关节角的求解最多可有8个结果,此为逆解。
基于正向运动学及逆向运动学的概念,我们知道当工具位姿确定时,机器人逆向运动学最多可算出8组关节位置。 8组关节位置可用三个变量来描述机器人相对于它的奇异点的姿态,如下表所示,此为解系。
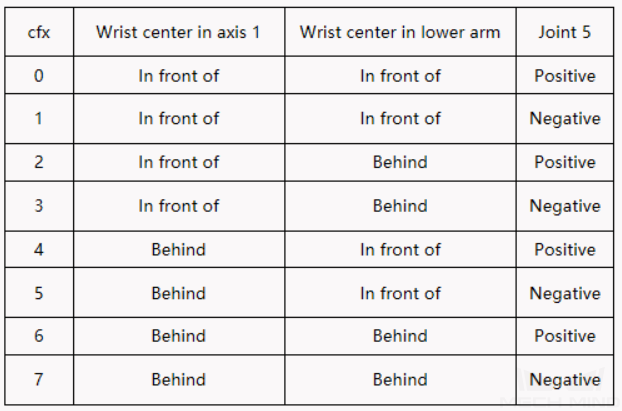
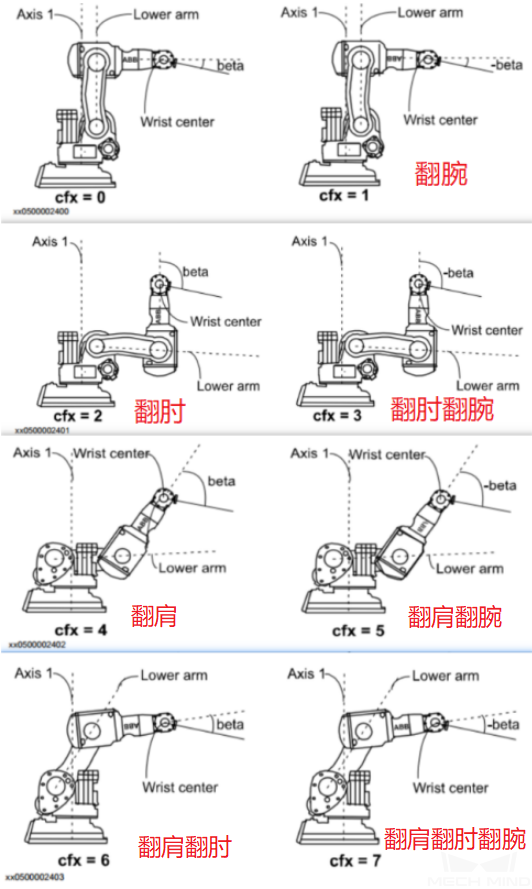
机器人运动过程中翻肩翻肘翻腕状态是相对的,需要与机器人当前位姿或上一位姿对比分析;例如cfx=0到cfx=1图中的机器人姿态只有机器人5轴角度从正变为负就是翻腕,图中标记的翻肩翻肘翻腕都是相对于cfx=0图片中的机器人姿态。八种解系对应机器人姿态如下图:
若不指定解系,则机器人可能跨解系选解,发生翻肩/翻腕/翻肘,使得机器人运动十分危险,或路径看上去不合理,且跨解系时会经过机器人的奇异点,可能导致机器人运动失败。当三个变量都被明确指定时,机器人至多只有1个可行解。